 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning
Paper and Code
Sep 16, 2023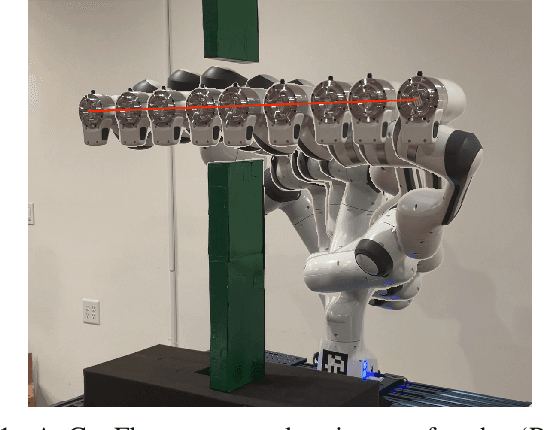
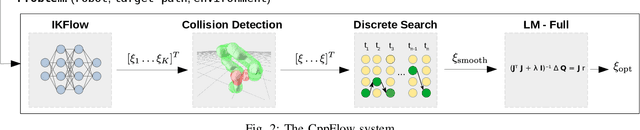
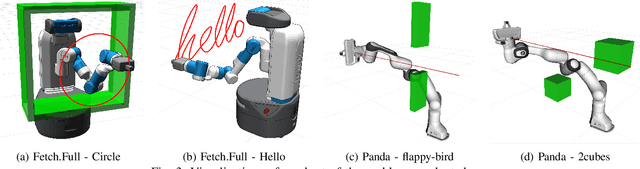
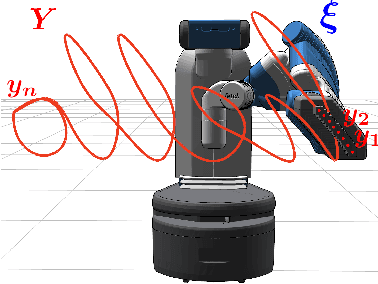
In this work we present CppFlow - a novel and performant planner for the Cartesian Path Planning problem, which finds valid trajectories up to 129x faster than current methods, while also succeeding on more difficult problems where others fail. At the core of the proposed algorithm is the use of a learned, generative Inverse Kinematics solver, which is able to efficiently produce promising entire candidate solution trajectories on the GPU. Precise, valid solutions are then found through classical approaches such as differentiable programming, global search, and optimization. In combining approaches from these two paradigms we get the best of both worlds - efficient approximate solutions from generative AI which are made exact using the guarantees of traditional planning and optimization. We evaluate our system against other state of the art methods on a set of established baselines as well as new ones introduced in this work and find that our method significantly outperforms others in terms of the time to find a valid solution and planning success rate, and performs comparably in terms of trajectory length over time. The work is made open source and available for use upon acceptance.