 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeterministic Iteratively Built KD-Tree with KNN Search for Exact Applications
Jun 07, 2021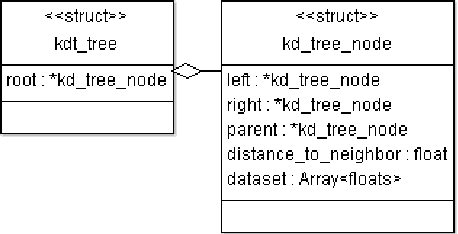
K-Nearest Neighbors (KNN) search is a fundamental algorithm in artificial intelligence software with applications in robotics, and autonomous vehicles. These wide-ranging applications utilize KNN either directly for simple classification or combine KNN results as input to other algorithms such as Locally Weighted Learning (LWL). Similar to binary trees, kd-trees become unbalanced as new data is added in online applications which can lead to rapid degradation in search performance unless the tree is rebuilt. Although approximate methods are suitable for graphics applications, which prioritize query speed over query accuracy, they are unsuitable for certain applications in autonomous systems, aeronautics, and robotic manipulation where exact solutions are desired. In this paper, we will attempt to assess the performance of non-recursive deterministic kd-tree functions and KNN functions. We will also present a "forest of interval kd-trees" which reduces the number of tree rebuilds, without compromising the exactness of query results.