 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Constraint Synthesis for Adaptive Trajectory Optimization via Large Language Models
Jun 02, 2026Trajectory optimization is a critical component for enabling safe and reliable autonomous operations in space exploration. As space missions increase in frequency, complexity, and scope, there is a growing need to rapidly formulate mathematically sound trajectory optimization problems that accurately reflect mission objectives and operational constraints. However, translating mission intent into tractable analytical formulations for trajectory optimization requires substantial domain expertise. This paper presents a framework that leverages large language models (LLMs) to translate natural language descriptions of mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations. Experiments in spacecraft rendezvous scenarios demonstrate a high success rate in reconditioning a convex trajectory optimization problem from semantic mission requirements. Ultimately, this work highlights the potential of LLMs to bridge high-level intent and formal optimization models, enabling more flexible and efficient trajectory design of spacecraft.
Semantic Trajectory Generation for Goal-Oriented Spacecraft Rendezvous
Dec 11, 2025Reliable real-time trajectory generation is essential for future autonomous spacecraft. While recent progress in nonconvex guidance and control is paving the way for onboard autonomous trajectory optimization, these methods still rely on extensive expert input (e.g., waypoints, constraints, mission timelines, etc.), which limits the operational scalability in real rendezvous missions. This paper introduces SAGES (Semantic Autonomous Guidance Engine for Space), a trajectory-generation framework that translates natural-language commands into spacecraft trajectories that reflect high-level intent while respecting nonconvex constraints. Experiments in two settings -- fault-tolerant proximity operations with continuous-time constraint enforcement and a free-flying robotic platform -- demonstrate that SAGES reliably produces trajectories aligned with human commands, achieving over 90% semantic-behavioral consistency across diverse behavior modes. Ultimately, this work marks an initial step toward language-conditioned, constraint-aware spacecraft trajectory generation, enabling operators to interactively guide both safety and behavior through intuitive natural-language commands with reduced expert burden.
Towards Robust Spacecraft Trajectory Optimization via Transformers
Oct 08, 2024Future multi-spacecraft missions require robust autonomous trajectory optimization capabilities to ensure safe and efficient rendezvous operations. This capability hinges on solving non-convex optimal control problems in real time, although traditional iterative methods such as sequential convex programming impose significant computational challenges. To mitigate this burden, the Autonomous Rendezvous Transformer introduced a generative model trained to provide near-optimal initial guesses. This approach provides convergence to better local optima (e.g., fuel optimality), improves feasibility rates, and results in faster convergence speed of optimization algorithms through warm-starting. This work extends the capabilities of ART to address robust chance-constrained optimal control problems. Specifically, ART is applied to challenging rendezvous scenarios in Low Earth Orbit (LEO), ensuring fault-tolerant behavior under uncertainty. Through extensive experimentation, the proposed warm-starting strategy is shown to consistently produce high-quality reference trajectories, achieving up to 30% cost improvement and 50% reduction in infeasible cases compared to conventional methods, demonstrating robust performance across multiple state representations. Additionally, a post hoc evaluation framework is proposed to assess the quality of generated trajectories and mitigate runtime failures, marking an initial step toward the reliable deployment of AI-driven solutions in safety-critical autonomous systems such as spacecraft.
Robust Constrained Multi-objective Evolutionary Algorithm based on Polynomial Chaos Expansion for Trajectory Optimization
May 23, 2022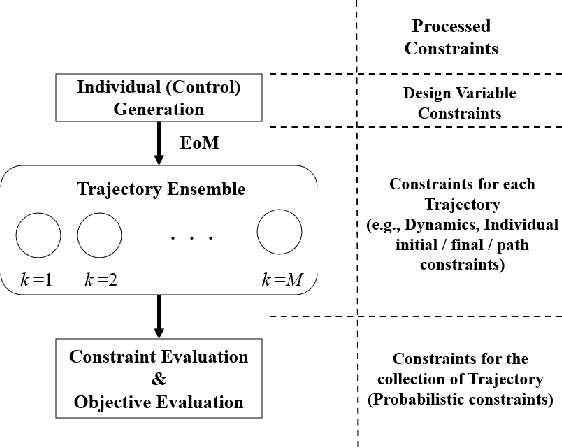
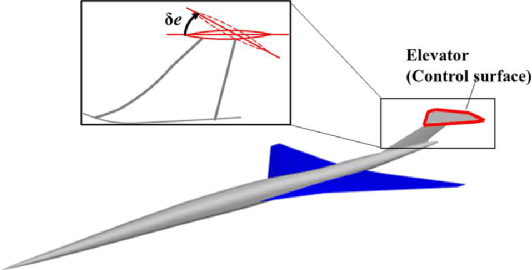
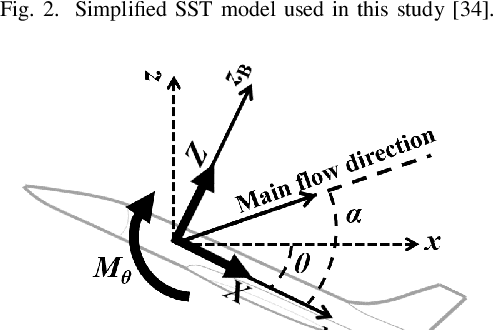
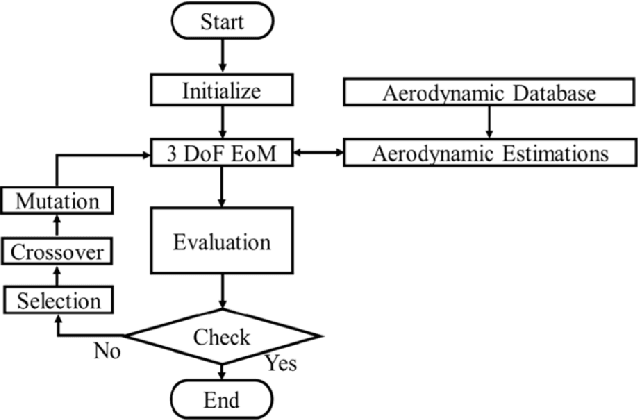
An integrated optimization method based on the constrained multi-objective evolutionary algorithm (MOEA) and non-intrusive polynomial chaos expansion (PCE) is proposed, which solves robust multi-objective optimization problems under time-series dynamics. The constraints in such problems are difficult to handle, not only because the number of the dynamic constraints is multiplied by the discretized time steps but also because each of them is probabilistic. The proposed method rewrites a robust formulation into a deterministic problem via the PCE, and then sequentially processes the generated constraints in population generation, trajectory generation, and evaluation by the MOEA. As a case study, the landing trajectory design of supersonic transport (SST) with wind uncertainty is optimized. Results demonstrate the quantitative influence of the constraint values over the optimized solution sets and corresponding trajectories, proposing robust flight controls.
Hierarchical Reinforcement Learning Framework for Stochastic Spaceflight Campaign Design
Mar 16, 2021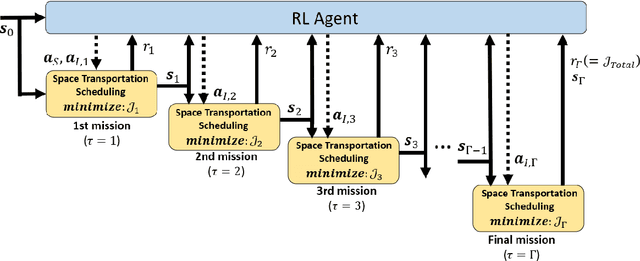

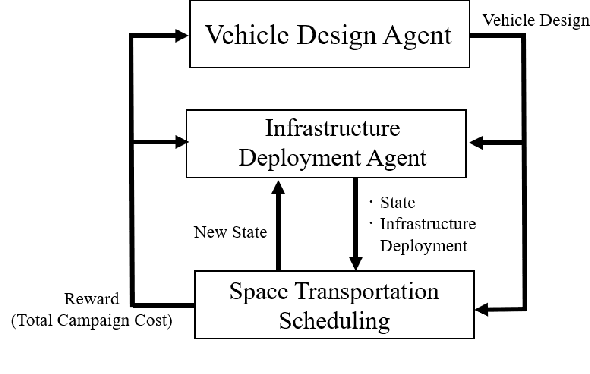
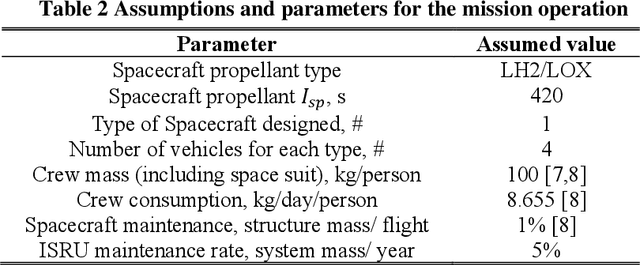
This paper develops a hierarchical reinforcement learning architecture for multi-mission spaceflight campaign design under uncertainty, including vehicle design, infrastructure deployment planning, and space transportation scheduling. This problem involves a high-dimensional design space and is challenging especially with uncertainty present. To tackle this challenge, the developed framework has a hierarchical structure with reinforcement learning (RL) and network-based mixed-integer linear programming (MILP), where the former optimizes campaign-level decisions (e.g., design of the vehicle used throughout the campaign, destination demand assigned to each mission in the campaign), whereas the latter optimizes the detailed mission-level decisions (e.g., when to launch what from where to where). The framework is applied to a set of human lunar exploration campaign scenarios with uncertain in-situ resource utilization (ISRU) performance as a case study. The main value of this work is its integration of the rapidly growing RL research and the existing MILP-based space logistics methods through a hierarchical framework to handle the otherwise intractable complexity of space mission design under uncertainty. We expect this unique framework to be a critical steppingstone for the emerging research direction of artificial intelligence for space mission design.