 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer-based Model Predictive Control: Trajectory Optimization via Sequence Modeling
Oct 31, 2024



Model predictive control (MPC) has established itself as the primary methodology for constrained control, enabling general-purpose robot autonomy in diverse real-world scenarios. However, for most problems of interest, MPC relies on the recursive solution of highly non-convex trajectory optimization problems, leading to high computational complexity and strong dependency on initialization. In this work, we present a unified framework to combine the main strengths of optimization-based and learning-based methods for MPC. Our approach entails embedding high-capacity, transformer-based neural network models within the optimization process for trajectory generation, whereby the transformer provides a near-optimal initial guess, or target plan, to a non-convex optimization problem. Our experiments, performed in simulation and the real world onboard a free flyer platform, demonstrate the capabilities of our framework to improve MPC convergence and runtime. Compared to purely optimization-based approaches, results show that our approach can improve trajectory generation performance by up to 75%, reduce the number of solver iterations by up to 45%, and improve overall MPC runtime by 7x without loss in performance.
* 8 pages, 7 figures. Datasets, videos and code available at: https://transformermpc.github.io
Generalizable Spacecraft Trajectory Generation via Multimodal Learning with Transformers
Oct 15, 2024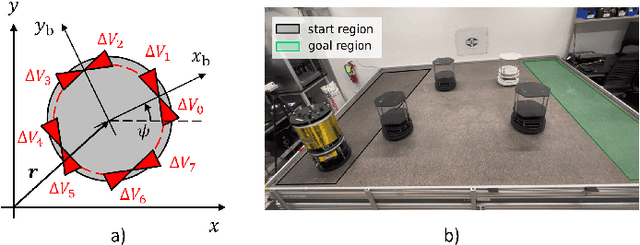
Effective trajectory generation is essential for reliable on-board spacecraft autonomy. Among other approaches, learning-based warm-starting represents an appealing paradigm for solving the trajectory generation problem, effectively combining the benefits of optimization- and data-driven methods. Current approaches for learning-based trajectory generation often focus on fixed, single-scenario environments, where key scene characteristics, such as obstacle positions or final-time requirements, remain constant across problem instances. However, practical trajectory generation requires the scenario to be frequently reconfigured, making the single-scenario approach a potentially impractical solution. To address this challenge, we present a novel trajectory generation framework that generalizes across diverse problem configurations, by leveraging high-capacity transformer neural networks capable of learning from multimodal data sources. Specifically, our approach integrates transformer-based neural network models into the trajectory optimization process, encoding both scene-level information (e.g., obstacle locations, initial and goal states) and trajectory-level constraints (e.g., time bounds, fuel consumption targets) via multimodal representations. The transformer network then generates near-optimal initial guesses for non-convex optimization problems, significantly enhancing convergence speed and performance. The framework is validated through extensive simulations and real-world experiments on a free-flyer platform, achieving up to 30% cost improvement and 80% reduction in infeasible cases with respect to traditional approaches, and demonstrating robust generalization across diverse scenario variations.
Towards Robust Spacecraft Trajectory Optimization via Transformers
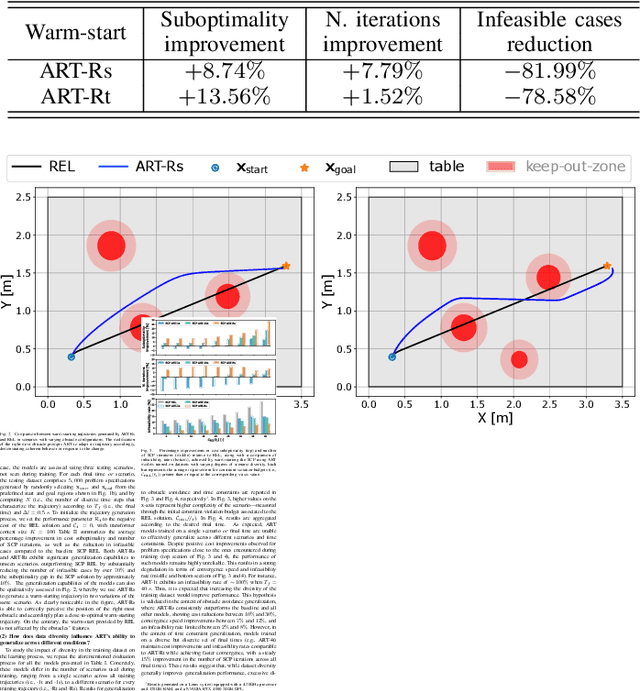
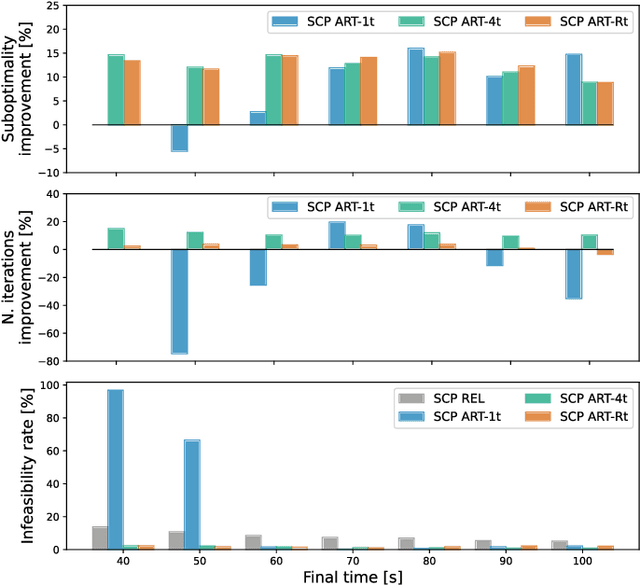
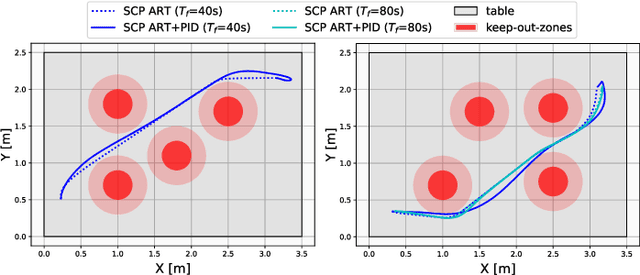
Oct 08, 2024Future multi-spacecraft missions require robust autonomous trajectory optimization capabilities to ensure safe and efficient rendezvous operations. This capability hinges on solving non-convex optimal control problems in real time, although traditional iterative methods such as sequential convex programming impose significant computational challenges. To mitigate this burden, the Autonomous Rendezvous Transformer introduced a generative model trained to provide near-optimal initial guesses. This approach provides convergence to better local optima (e.g., fuel optimality), improves feasibility rates, and results in faster convergence speed of optimization algorithms through warm-starting. This work extends the capabilities of ART to address robust chance-constrained optimal control problems. Specifically, ART is applied to challenging rendezvous scenarios in Low Earth Orbit (LEO), ensuring fault-tolerant behavior under uncertainty. Through extensive experimentation, the proposed warm-starting strategy is shown to consistently produce high-quality reference trajectories, achieving up to 30% cost improvement and 50% reduction in infeasible cases compared to conventional methods, demonstrating robust performance across multiple state representations. Additionally, a post hoc evaluation framework is proposed to assess the quality of generated trajectories and mitigate runtime failures, marking an initial step toward the reliable deployment of AI-driven solutions in safety-critical autonomous systems such as spacecraft.
Adapting a Foundation Model for Space-based Tasks
Aug 12, 2024



Foundation models, e.g., large language models, possess attributes of intelligence which offer promise to endow a robot with the contextual understanding necessary to navigate complex, unstructured tasks in the wild. In the future of space robotics, we see three core challenges which motivate the use of a foundation model adapted to space-based applications: 1) Scalability of ground-in-the-loop operations; 2) Generalizing prior knowledge to novel environments; and 3) Multi-modality in tasks and sensor data. Therefore, as a first-step towards building a foundation model for space-based applications, we automatically label the AI4Mars dataset to curate a language annotated dataset of visual-question-answer tuples. We fine-tune a pretrained LLaVA checkpoint on this dataset to endow a vision-language model with the ability to perform spatial reasoning and navigation on Mars' surface. In this work, we demonstrate that 1) existing vision-language models are deficient visual reasoners in space-based applications, and 2) fine-tuning a vision-language model on extraterrestrial data significantly improves the quality of responses even with a limited training dataset of only a few thousand samples.
Transformers for Trajectory Optimization with Application to Spacecraft Rendezvous
Oct 20, 2023Reliable and efficient trajectory optimization methods are a fundamental need for autonomous dynamical systems, effectively enabling applications including rocket landing, hypersonic reentry, spacecraft rendezvous, and docking. Within such safety-critical application areas, the complexity of the emerging trajectory optimization problems has motivated the application of AI-based techniques to enhance the performance of traditional approaches. However, current AI-based methods either attempt to fully replace traditional control algorithms, thus lacking constraint satisfaction guarantees and incurring in expensive simulation, or aim to solely imitate the behavior of traditional methods via supervised learning. To address these limitations, this paper proposes the Autonomous Rendezvous Transformer (ART) and assesses the capability of modern generative models to solve complex trajectory optimization problems, both from a forecasting and control standpoint. Specifically, this work assesses the capabilities of Transformers to (i) learn near-optimal policies from previously collected data, and (ii) warm-start a sequential optimizer for the solution of non-convex optimal control problems, thus guaranteeing hard constraint satisfaction. From a forecasting perspective, results highlight how ART outperforms other learning-based architectures at predicting known fuel-optimal trajectories. From a control perspective, empirical analyses show how policies learned through Transformers are able to generate near-optimal warm-starts, achieving trajectories that are (i) more fuel-efficient, (ii) obtained in fewer sequential optimizer iterations, and (iii) computed with an overall runtime comparable to benchmarks based on convex optimization.