 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoundation models on the bridge: Semantic hazard detection and safety maneuvers for maritime autonomy with vision-language models
Dec 30, 2025The draft IMO MASS Code requires autonomous and remotely supervised maritime vessels to detect departures from their operational design domain, enter a predefined fallback that notifies the operator, permit immediate human override, and avoid changing the voyage plan without approval. Meeting these obligations in the alert-to-takeover gap calls for a short-horizon, human-overridable fallback maneuver. Classical maritime autonomy stacks struggle when the correct action depends on meaning (e.g., diver-down flag means people in the water, fire close by means hazard). We argue (i) that vision-language models (VLMs) provide semantic awareness for such out-of-distribution situations, and (ii) that a fast-slow anomaly pipeline with a short-horizon, human-overridable fallback maneuver makes this practical in the handover window. We introduce Semantic Lookout, a camera-only, candidate-constrained vision-language model (VLM) fallback maneuver selector that selects one cautious action (or station-keeping) from water-valid, world-anchored trajectories under continuous human authority. On 40 harbor scenes we measure per-call scene understanding and latency, alignment with human consensus (model majority-of-three voting), short-horizon risk-relief on fire hazard scenes, and an on-water alert->fallback maneuver->operator handover. Sub-10 s models retain most of the awareness of slower state-of-the-art models. The fallback maneuver selector outperforms geometry-only baselines and increases standoff distance on fire scenes. A field run verifies end-to-end operation. These results support VLMs as semantic fallback maneuver selectors compatible with the draft IMO MASS Code, within practical latency budgets, and motivate future work on domain-adapted, hybrid autonomy that pairs foundation-model semantics with multi-sensor bird's-eye-view perception and short-horizon replanning.
CUPID: Curating Data your Robot Loves with Influence Functions
Jun 23, 2025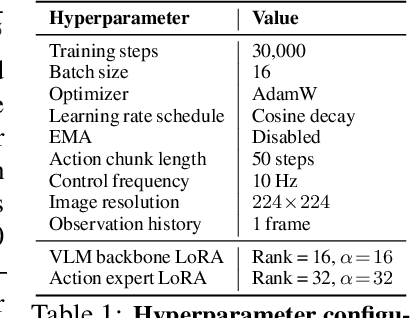
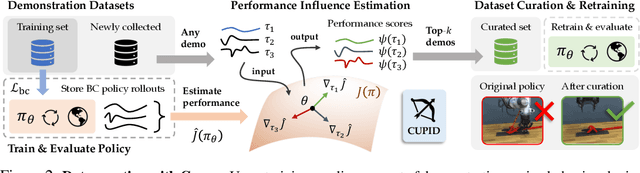
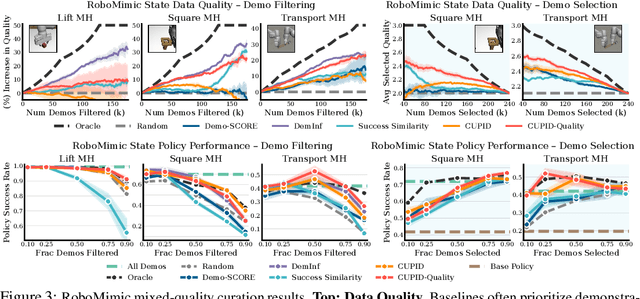
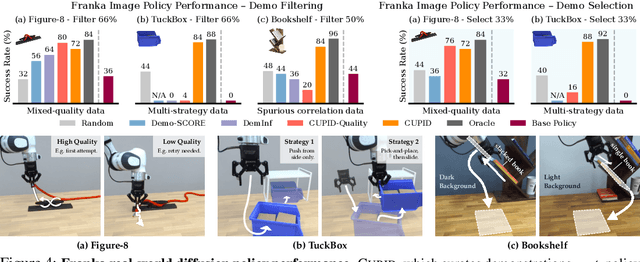
In robot imitation learning, policy performance is tightly coupled with the quality and composition of the demonstration data. Yet, developing a precise understanding of how individual demonstrations contribute to downstream outcomes - such as closed-loop task success or failure - remains a persistent challenge. We propose CUPID, a robot data curation method based on a novel influence function-theoretic formulation for imitation learning policies. Given a set of evaluation rollouts, CUPID estimates the influence of each training demonstration on the policy's expected return. This enables ranking and selection of demonstrations according to their impact on the policy's closed-loop performance. We use CUPID to curate data by 1) filtering out training demonstrations that harm policy performance and 2) subselecting newly collected trajectories that will most improve the policy. Extensive simulated and hardware experiments show that our approach consistently identifies which data drives test-time performance. For example, training with less than 33% of curated data can yield state-of-the-art diffusion policies on the simulated RoboMimic benchmark, with similar gains observed in hardware. Furthermore, hardware experiments show that our method can identify robust strategies under distribution shift, isolate spurious correlations, and even enhance the post-training of generalist robot policies. Additional materials are made available at: https://cupid-curation.github.io.
Real-Time Out-of-Distribution Failure Prevention via Multi-Modal Reasoning
May 15, 2025



Foundation models can provide robust high-level reasoning on appropriate safety interventions in hazardous scenarios beyond a robot's training data, i.e. out-of-distribution (OOD) failures. However, due to the high inference latency of Large Vision and Language Models, current methods rely on manually defined intervention policies to enact fallbacks, thereby lacking the ability to plan generalizable, semantically safe motions. To overcome these challenges we present FORTRESS, a framework that generates and reasons about semantically safe fallback strategies in real time to prevent OOD failures. At a low frequency in nominal operations, FORTRESS uses multi-modal reasoners to identify goals and anticipate failure modes. When a runtime monitor triggers a fallback response, FORTRESS rapidly synthesizes plans to fallback goals while inferring and avoiding semantically unsafe regions in real time. By bridging open-world, multi-modal reasoning with dynamics-aware planning, we eliminate the need for hard-coded fallbacks and human safety interventions. FORTRESS outperforms on-the-fly prompting of slow reasoning models in safety classification accuracy on synthetic benchmarks and real-world ANYmal robot data, and further improves system safety and planning success in simulation and on quadrotor hardware for urban navigation.
Unpacking Failure Modes of Generative Policies: Runtime Monitoring of Consistency and Progress
Oct 06, 2024
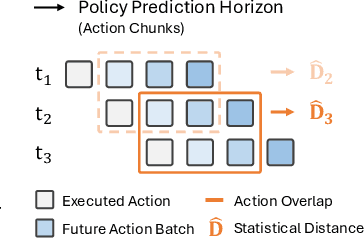

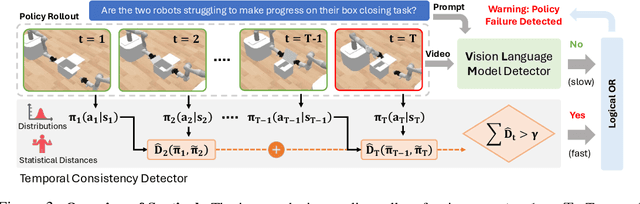
Robot behavior policies trained via imitation learning are prone to failure under conditions that deviate from their training data. Thus, algorithms that monitor learned policies at test time and provide early warnings of failure are necessary to facilitate scalable deployment. We propose Sentinel, a runtime monitoring framework that splits the detection of failures into two complementary categories: 1) Erratic failures, which we detect using statistical measures of temporal action consistency, and 2) task progression failures, where we use Vision Language Models (VLMs) to detect when the policy confidently and consistently takes actions that do not solve the task. Our approach has two key strengths. First, because learned policies exhibit diverse failure modes, combining complementary detectors leads to significantly higher accuracy at failure detection. Second, using a statistical temporal action consistency measure ensures that we quickly detect when multimodal, generative policies exhibit erratic behavior at negligible computational cost. In contrast, we only use VLMs to detect failure modes that are less time-sensitive. We demonstrate our approach in the context of diffusion policies trained on robotic mobile manipulation domains in both simulation and the real world. By unifying temporal consistency detection and VLM runtime monitoring, Sentinel detects 18% more failures than using either of the two detectors alone and significantly outperforms baselines, thus highlighting the importance of assigning specialized detectors to complementary categories of failure. Qualitative results are made available at https://sites.google.com/stanford.edu/sentinel.
Adapting a Foundation Model for Space-based Tasks
Aug 12, 2024



Foundation models, e.g., large language models, possess attributes of intelligence which offer promise to endow a robot with the contextual understanding necessary to navigate complex, unstructured tasks in the wild. In the future of space robotics, we see three core challenges which motivate the use of a foundation model adapted to space-based applications: 1) Scalability of ground-in-the-loop operations; 2) Generalizing prior knowledge to novel environments; and 3) Multi-modality in tasks and sensor data. Therefore, as a first-step towards building a foundation model for space-based applications, we automatically label the AI4Mars dataset to curate a language annotated dataset of visual-question-answer tuples. We fine-tune a pretrained LLaVA checkpoint on this dataset to endow a vision-language model with the ability to perform spatial reasoning and navigation on Mars' surface. In this work, we demonstrate that 1) existing vision-language models are deficient visual reasoners in space-based applications, and 2) fine-tuning a vision-language model on extraterrestrial data significantly improves the quality of responses even with a limited training dataset of only a few thousand samples.
Real-Time Anomaly Detection and Reactive Planning with Large Language Models
Jul 11, 2024



Foundation models, e.g., large language models (LLMs), trained on internet-scale data possess zero-shot generalization capabilities that make them a promising technology towards detecting and mitigating out-of-distribution failure modes of robotic systems. Fully realizing this promise, however, poses two challenges: (i) mitigating the considerable computational expense of these models such that they may be applied online, and (ii) incorporating their judgement regarding potential anomalies into a safe control framework. In this work, we present a two-stage reasoning framework: First is a fast binary anomaly classifier that analyzes observations in an LLM embedding space, which may then trigger a slower fallback selection stage that utilizes the reasoning capabilities of generative LLMs. These stages correspond to branch points in a model predictive control strategy that maintains the joint feasibility of continuing along various fallback plans to account for the slow reasoner's latency as soon as an anomaly is detected, thus ensuring safety. We show that our fast anomaly classifier outperforms autoregressive reasoning with state-of-the-art GPT models, even when instantiated with relatively small language models. This enables our runtime monitor to improve the trustworthiness of dynamic robotic systems, such as quadrotors or autonomous vehicles, under resource and time constraints. Videos illustrating our approach in both simulation and real-world experiments are available on this project page: https://sites.google.com/view/aesop-llm.
Learning Temporal Logic Predicates from Data with Statistical Guarantees
Jun 15, 2024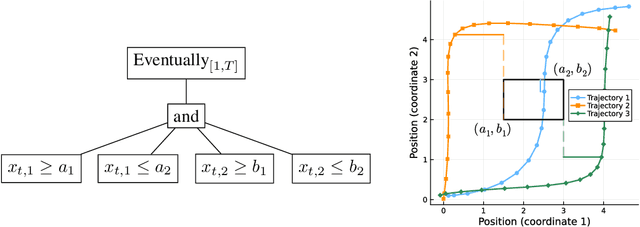
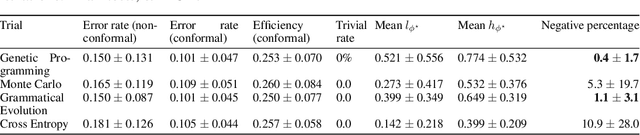
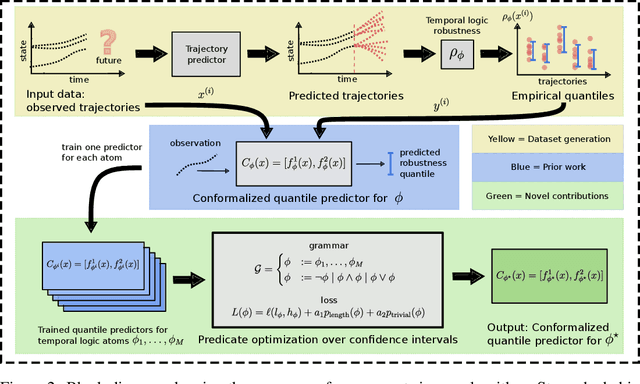
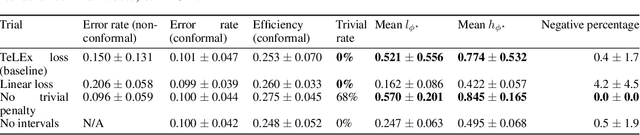
Temporal logic rules are often used in control and robotics to provide structured, human-interpretable descriptions of high-dimensional trajectory data. These rules have numerous applications including safety validation using formal methods, constraining motion planning among autonomous agents, and classifying data. However, existing methods for learning temporal logic predicates from data provide no assurances about the correctness of the resulting predicate. We present a novel method to learn temporal logic predicates from data with finite-sample correctness guarantees. Our approach leverages expression optimization and conformal prediction to learn predicates that correctly describe future trajectories under mild assumptions with a user-defined confidence level. We provide experimental results showing the performance of our approach on a simulated trajectory dataset and perform ablation studies to understand how each component of our algorithm contributes to its performance.
Closing the Loop on Runtime Monitors with Fallback-Safe MPC
Sep 18, 2023



When we rely on deep-learned models for robotic perception, we must recognize that these models may behave unreliably on inputs dissimilar from the training data, compromising the closed-loop system's safety. This raises fundamental questions on how we can assess confidence in perception systems and to what extent we can take safety-preserving actions when external environmental changes degrade our perception model's performance. Therefore, we present a framework to certify the safety of a perception-enabled system deployed in novel contexts. To do so, we leverage robust model predictive control (MPC) to control the system using the perception estimates while maintaining the feasibility of a safety-preserving fallback plan that does not rely on the perception system. In addition, we calibrate a runtime monitor using recently proposed conformal prediction techniques to certifiably detect when the perception system degrades beyond the tolerance of the MPC controller, resulting in an end-to-end safety assurance. We show that this control framework and calibration technique allows us to certify the system's safety with orders of magnitudes fewer samples than required to retrain the perception network when we deploy in a novel context on a photo-realistic aircraft taxiing simulator. Furthermore, we illustrate the safety-preserving behavior of the MPC on simulated examples of a quadrotor. We open-source our simulation platform and provide videos of our results at our project page: https://tinyurl.com/fallback-safe-mpc.
Semantic Anomaly Detection with Large Language Models
May 18, 2023As robots acquire increasingly sophisticated skills and see increasingly complex and varied environments, the threat of an edge case or anomalous failure is ever present. For example, Tesla cars have seen interesting failure modes ranging from autopilot disengagements due to inactive traffic lights carried by trucks to phantom braking caused by images of stop signs on roadside billboards. These system-level failures are not due to failures of any individual component of the autonomy stack but rather system-level deficiencies in semantic reasoning. Such edge cases, which we call \textit{semantic anomalies}, are simple for a human to disentangle yet require insightful reasoning. To this end, we study the application of large language models (LLMs), endowed with broad contextual understanding and reasoning capabilities, to recognize these edge semantic cases. We introduce a monitoring framework for semantic anomaly detection in vision-based policies to do so. Our experiments evaluate this framework in monitoring a learned policy for object manipulation and a finite state machine policy for autonomous driving and demonstrate that an LLM-based monitor can serve as a proxy for human reasoning. Finally, we provide an extended discussion on the strengths and weaknesses of this approach and motivate a research outlook on how we can further use foundation models for semantic anomaly detection.
A System-Level View on Out-of-Distribution Data in Robotics
Dec 28, 2022When testing conditions differ from those represented in training data, so-called out-of-distribution (OOD) inputs can mar the reliability of black-box learned components in the modern robot autonomy stack. Therefore, coping with OOD data is an important challenge on the path towards trustworthy learning-enabled open-world autonomy. In this paper, we aim to demystify the topic of OOD data and its associated challenges in the context of data-driven robotic systems, drawing connections to emerging paradigms in the ML community that study the effect of OOD data on learned models in isolation. We argue that as roboticists, we should reason about the overall system-level competence of a robot as it performs tasks in OOD conditions. We highlight key research questions around this system-level view of OOD problems to guide future research toward safe and reliable learning-enabled autonomy.