 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA System-Level View on Out-of-Distribution Data in Robotics
Dec 28, 2022When testing conditions differ from those represented in training data, so-called out-of-distribution (OOD) inputs can mar the reliability of black-box learned components in the modern robot autonomy stack. Therefore, coping with OOD data is an important challenge on the path towards trustworthy learning-enabled open-world autonomy. In this paper, we aim to demystify the topic of OOD data and its associated challenges in the context of data-driven robotic systems, drawing connections to emerging paradigms in the ML community that study the effect of OOD data on learned models in isolation. We argue that as roboticists, we should reason about the overall system-level competence of a robot as it performs tasks in OOD conditions. We highlight key research questions around this system-level view of OOD problems to guide future research toward safe and reliable learning-enabled autonomy.
AlignedReID: Surpassing Human-Level Performance in Person Re-Identification
Jan 31, 2018
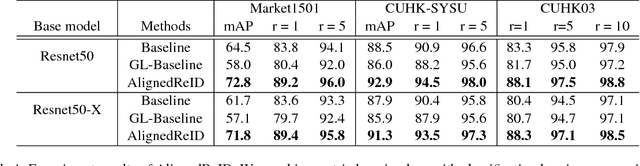
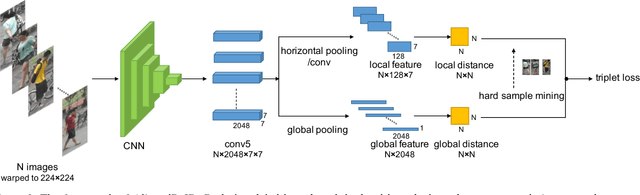
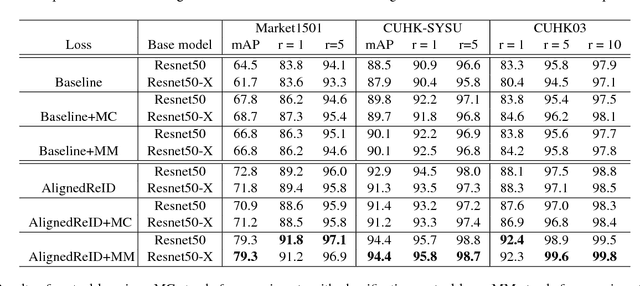
In this paper, we propose a novel method called AlignedReID that extracts a global feature which is jointly learned with local features. Global feature learning benefits greatly from local feature learning, which performs an alignment/matching by calculating the shortest path between two sets of local features, without requiring extra supervision. After the joint learning, we only keep the global feature to compute the similarities between images. Our method achieves rank-1 accuracy of 94.4% on Market1501 and 97.8% on CUHK03, outperforming state-of-the-art methods by a large margin. We also evaluate human-level performance and demonstrate that our method is the first to surpass human-level performance on Market1501 and CUHK03, two widely used Person ReID datasets.