 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Control with Inherent Lyapunov Stability
Mar 06, 2023Recent advances in learning-based control leverage deep function approximators, such as neural networks, to model the evolution of controlled dynamical systems over time. However, the problem of learning a dynamics model and a stabilizing controller persists, since the synthesis of a stabilizing feedback law for known nonlinear systems is a difficult task, let alone for complex parametric representations that must be fit to data. To this end, we propose a method for jointly learning parametric representations of a nonlinear dynamics model and a stabilizing controller from data. To do this, our approach simultaneously learns a parametric Lyapunov function which intrinsically constrains the dynamics model to be stabilizable by the learned controller. In addition to the stabilizability of the learned dynamics guaranteed by our novel construction, we show that the learned controller stabilizes the true dynamics under certain assumptions on the fidelity of the learned dynamics. Finally, we demonstrate the efficacy of our method on a variety of simulated nonlinear dynamical systems.
Learning Control-Oriented Dynamical Structure from Data
Feb 06, 2023


Even for known nonlinear dynamical systems, feedback controller synthesis is a difficult problem that often requires leveraging the particular structure of the dynamics to induce a stable closed-loop system. For general nonlinear models, including those fit to data, there may not be enough known structure to reliably synthesize a stabilizing feedback controller. In this paper, we propose a novel nonlinear tracking controller formulation based on a state-dependent Riccati equation for general nonlinear control-affine systems. Our formulation depends on a nonlinear factorization of the system of vector fields defining the control-affine dynamics, which we show always exists under mild smoothness assumptions. We discuss how this factorization can be learned from a finite set of data. On a variety of simulated nonlinear dynamical systems, we demonstrate the efficacy of learned versions of our controller in stable trajectory tracking. Alongside our method, we evaluate recent ideas in jointly learning a controller and stabilizability certificate for known dynamical systems; we show empirically that such methods can be data-inefficient in comparison.
A System-Level View on Out-of-Distribution Data in Robotics
Dec 28, 2022When testing conditions differ from those represented in training data, so-called out-of-distribution (OOD) inputs can mar the reliability of black-box learned components in the modern robot autonomy stack. Therefore, coping with OOD data is an important challenge on the path towards trustworthy learning-enabled open-world autonomy. In this paper, we aim to demystify the topic of OOD data and its associated challenges in the context of data-driven robotic systems, drawing connections to emerging paradigms in the ML community that study the effect of OOD data on learned models in isolation. We argue that as roboticists, we should reason about the overall system-level competence of a robot as it performs tasks in OOD conditions. We highlight key research questions around this system-level view of OOD problems to guide future research toward safe and reliable learning-enabled autonomy.
Adaptive Robust Model Predictive Control via Uncertainty Cancellation
Dec 02, 2022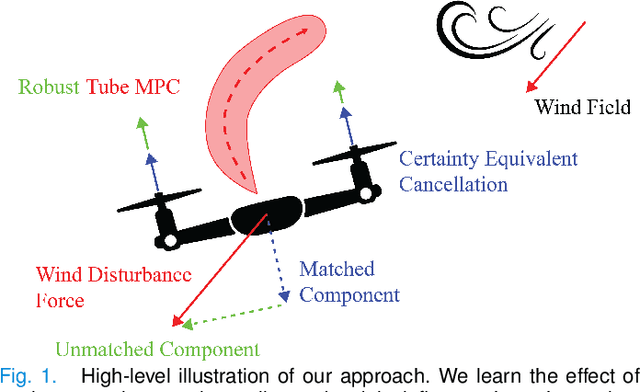
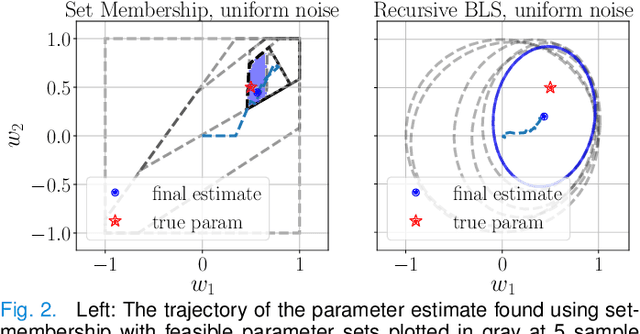
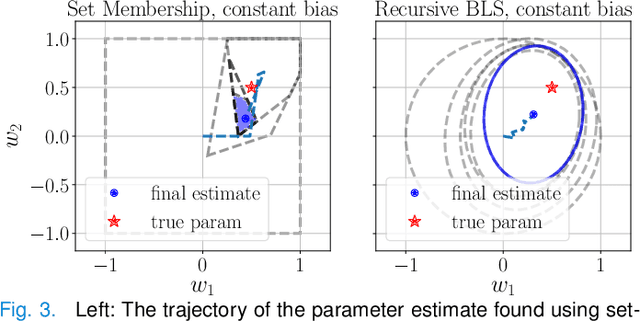
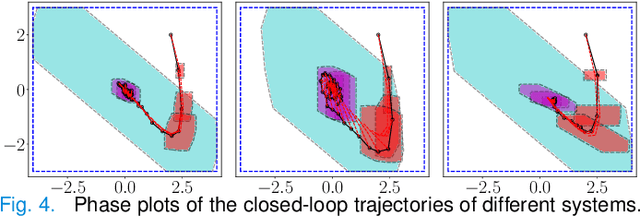
We propose a learning-based robust predictive control algorithm that compensates for significant uncertainty in the dynamics for a class of discrete-time systems that are nominally linear with an additive nonlinear component. Such systems commonly model the nonlinear effects of an unknown environment on a nominal system. We optimize over a class of nonlinear feedback policies inspired by certainty equivalent "estimate-and-cancel" control laws pioneered in classical adaptive control to achieve significant performance improvements in the presence of uncertainties of large magnitude, a setting in which existing learning-based predictive control algorithms often struggle to guarantee safety. In contrast to previous work in robust adaptive MPC, our approach allows us to take advantage of structure (i.e., the numerical predictions) in the a priori unknown dynamics learned online through function approximation. Our approach also extends typical nonlinear adaptive control methods to systems with state and input constraints even when we cannot directly cancel the additive uncertain function from the dynamics. We apply contemporary statistical estimation techniques to certify the system's safety through persistent constraint satisfaction with high probability. Moreover, we propose using Bayesian meta-learning algorithms that learn calibrated model priors to help satisfy the assumptions of the control design in challenging settings. Finally, we show in simulation that our method can accommodate more significant unknown dynamics terms than existing methods and that the use of Bayesian meta-learning allows us to adapt to the test environments more rapidly.
Control-oriented meta-learning
Apr 14, 2022

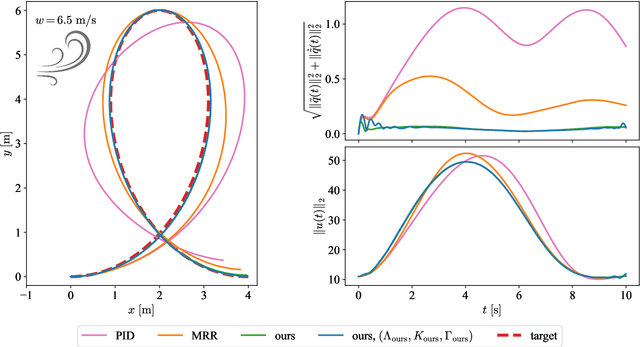

Real-time adaptation is imperative to the control of robots operating in complex, dynamic environments. Adaptive control laws can endow even nonlinear systems with good trajectory tracking performance, provided that any uncertain dynamics terms are linearly parameterizable with known nonlinear features. However, it is often difficult to specify such features a priori, such as for aerodynamic disturbances on rotorcraft or interaction forces between a manipulator arm and various objects. In this paper, we turn to data-driven modeling with neural networks to learn, offline from past data, an adaptive controller with an internal parametric model of these nonlinear features. Our key insight is that we can better prepare the controller for deployment with control-oriented meta-learning of features in closed-loop simulation, rather than regression-oriented meta-learning of features to fit input-output data. Specifically, we meta-learn the adaptive controller with closed-loop tracking simulation as the base-learner and the average tracking error as the meta-objective. With both fully-actuated and underactuated nonlinear planar rotorcraft subject to wind, we demonstrate that our adaptive controller outperforms other controllers trained with regression-oriented meta-learning when deployed in closed-loop for trajectory tracking control.
Adaptive Robust Model Predictive Control with Matched and Unmatched Uncertainty
May 13, 2021


We propose a learning-based robust predictive control algorithm that can handle large uncertainty in the dynamics for a class of discrete-time systems that are nominally linear with an additive nonlinear dynamics component. Such systems commonly model the nonlinear effects of an unknown environment on a nominal system. Motivated by an inability of existing learning-based predictive control algorithms to achieve safety guarantees in the presence of uncertainties of large magnitude in this setting, we achieve significant performance improvements by optimizing over a novel class of nonlinear feedback policies inspired by certainty equivalent "estimate-and-cancel" control laws pioneered in classical adaptive control. In contrast with previous work in robust adaptive MPC, this allows us to take advantage of the structure in the a priori unknown dynamics that are learned online through function approximation. Our approach also extends typical nonlinear adaptive control methods to systems with state and input constraints even when an additive uncertain function cannot directly be canceled from the dynamics. Moreover, our approach allows us to apply contemporary statistical estimation techniques to certify the safety of the system through persistent constraint satisfaction with high probability. We show that our method allows us to consider larger unknown terms in the dynamics than existing methods through simulated examples.
Adaptive-Control-Oriented Meta-Learning for Nonlinear Systems
Mar 07, 2021
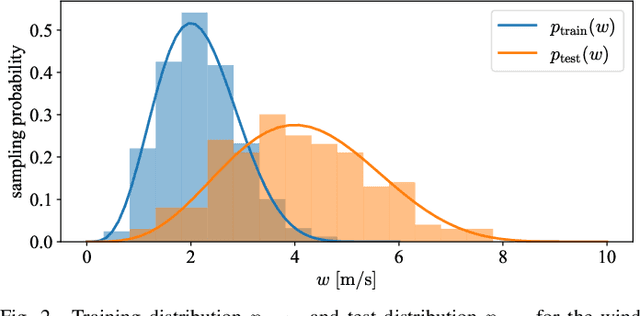

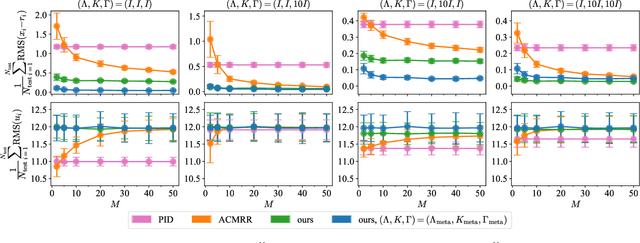
Real-time adaptation is imperative to the control of robots operating in complex, dynamic environments. Adaptive control laws can endow even nonlinear systems with good trajectory tracking performance, provided that any uncertain dynamics terms are linearly parameterizable with known nonlinear features. However, it is often difficult to specify such features a priori, such as for aerodynamic disturbances on rotorcraft or interaction forces between a manipulator arm and various objects. In this paper, we turn to data-driven modeling with neural networks to learn, offline from past data, an adaptive controller with an internal parametric model of these nonlinear features. Our key insight is that we can better prepare the controller for deployment with control-oriented meta-learning of features in closed-loop simulation, rather than regression-oriented meta-learning of features to fit input-output data. Specifically, we meta-learn the adaptive controller with closed-loop tracking simulation as the base-learner and the average tracking error as the meta-objective. With a nonlinear planar rotorcraft subject to wind, we demonstrate that our adaptive controller outperforms other controllers trained with regression-oriented meta-learning when deployed in closed-loop for trajectory tracking control.
Learning Stabilizable Nonlinear Dynamics with Contraction-Based Regularization
Jul 29, 2019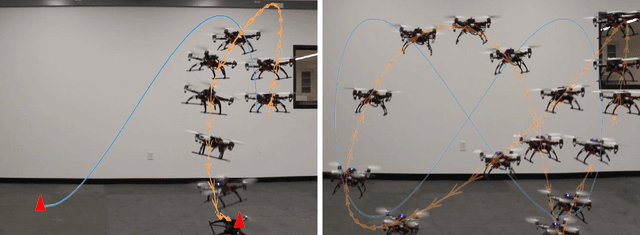

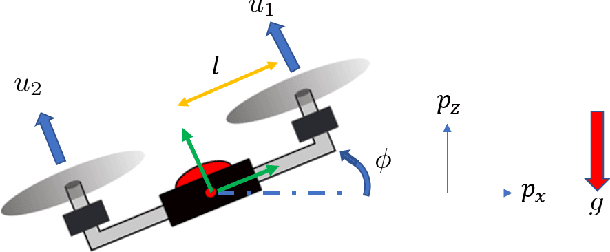

We propose a novel framework for learning stabilizable nonlinear dynamical systems for continuous control tasks in robotics. The key contribution is a control-theoretic regularizer for dynamics fitting rooted in the notion of stabilizability, a constraint which guarantees the existence of robust tracking controllers for arbitrary open-loop trajectories generated with the learned system. Leveraging tools from contraction theory and statistical learning in Reproducing Kernel Hilbert Spaces, we formulate stabilizable dynamics learning as a functional optimization with convex objective and bi-convex functional constraints. Under a mild structural assumption and relaxation of the functional constraints to sampling-based constraints, we derive the optimal solution with a modified Representer theorem. Finally, we utilize random matrix feature approximations to reduce the dimensionality of the search parameters and formulate an iterative convex optimization algorithm that jointly fits the dynamics functions and searches for a certificate of stabilizability. We validate the proposed algorithm in simulation for a planar quadrotor, and on a quadrotor hardware testbed emulating planar dynamics. We verify, both in simulation and on hardware, significantly improved trajectory generation and tracking performance with the control-theoretic regularized model over models learned using traditional regression techniques, especially when learning from small supervised datasets. The results support the conjecture that the use of stabilizability constraints as a form of regularization can help prune the hypothesis space in a manner that is tailored to the downstream task of trajectory generation and feedback control, resulting in models that are not only dramatically better conditioned, but also data efficient.
The Lyapunov Neural Network: Adaptive Stability Certification for Safe Learning of Dynamical Systems
Oct 01, 2018


Learning algorithms have shown considerable prowess in simulation by allowing robots to adapt to uncertain environments and improve their performance. However, such algorithms are rarely used in practice on safety-critical systems, since the learned policy typically does not yield any safety guarantees. That is, the required exploration may cause physical harm to the robot or its environment. In this paper, we present a method to learn accurate safety certificates for nonlinear, closed-loop dynamical systems. Specifically, we construct a neural network Lyapunov function and a training algorithm that adapts it to the shape of the largest safe region in the state space. The algorithm relies only on knowledge of inputs and outputs of the dynamics, rather than on any specific model structure. We demonstrate our method by learning the safe region of attraction for a simulated inverted pendulum. Furthermore, we discuss how our method can be used in safe learning algorithms together with statistical models of dynamical systems.