 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Temporal Logic Predicates from Data with Statistical Guarantees
Jun 15, 2024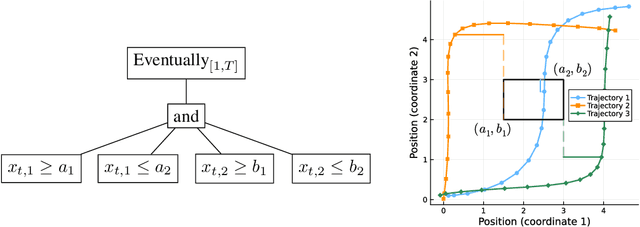
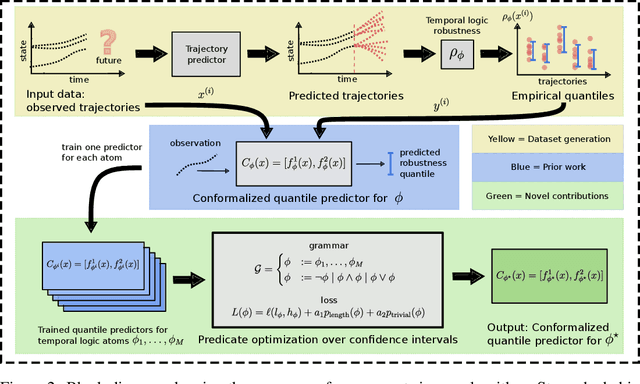
Temporal logic rules are often used in control and robotics to provide structured, human-interpretable descriptions of high-dimensional trajectory data. These rules have numerous applications including safety validation using formal methods, constraining motion planning among autonomous agents, and classifying data. However, existing methods for learning temporal logic predicates from data provide no assurances about the correctness of the resulting predicate. We present a novel method to learn temporal logic predicates from data with finite-sample correctness guarantees. Our approach leverages expression optimization and conformal prediction to learn predicates that correctly describe future trajectories under mild assumptions with a user-defined confidence level. We provide experimental results showing the performance of our approach on a simulated trajectory dataset and perform ablation studies to understand how each component of our algorithm contributes to its performance.