 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgefrax: Fast Robot Kinematics and Dynamics in JAX
Apr 05, 2026In robot control, planning, and learning, there is a need for rigid-body dynamics libraries that are highly performant, easy to use, and compatible with CPUs and accelerators. While existing libraries often excel at either low-latency CPU execution or high-throughput GPU workloads, few provide a unified framework that targets multiple architectures without compromising performance or ease-of-use. To address this, we introduce frax, a JAX-based library for robot kinematics and dynamics, providing a high-performance, pure-Python interface across CPU, GPU, and TPU. Via a fully-vectorized approach to robot dynamics, frax enables efficient real-time control and parallelization, while supporting automatic differentiation for optimization-based methods. On CPU, frax achieves low-microsecond computation times suitable for kilohertz control rates, outperforming common libraries in Python and approaching optimized C++ implementations. On GPU, the same code scales to thousands of instances, reaching upwards of 100 million dynamics evaluations per second. We validate performance on a Franka Panda manipulator and a Unitree G1 humanoid, and release frax as an open-source library.
Long-Reach Robotic Cleaning for Lunar Solar Arrays
Mar 31, 2026Commercial lunar activity is accelerating the need for reliable surface infrastructure and routine operations to keep it functioning. Maintenance tasks such as inspection, cleaning, dust mitigation, and minor repair are essential to preserve performance and extend system life. A specific application is the cleaning of lunar solar arrays. Solar arrays are expected to provide substantial fraction of lunar surface power and operate for months to years, supplying continuous energy to landers, habitats, and surface assets, making sustained output mission-critical. However, over time lunar dust accumulates on these large solar arrays, which can rapidly degrade panel output and reduce mission lifetime. We propose a small mobile robot equipped with a long-reach, lightweight deployable boom and interchangeable cleaning tool to perform gentle cleaning over meter-scale workspaces with minimal human involvement. Building on prior vision-guided long-reach manipulation, we add a compliant wrist with distal force sensing and a velocity-based admittance controller to regulate stable contact during surface cleaning. In preliminary benchtop experiments on a planar surface, the system maintained approximately 2 N normal force while executing a simple cleaning motion over boom lengths from 0.3 m to 1.0 m, with RMS force error of approximately 0.2 N after initial contact. These early results suggest that deployable long-reach manipulators are a promising architecture for robotic maintenance of lunar infrastructure such as solar arrays, radiators, and optical surfaces.
Long-Reach Robotic Manipulation for Assembly and Outfitting of Lunar Structures
Mar 31, 2026Future infrastructure construction on the lunar surface will require semi- or fully-autonomous operation from robots deployed at the build site. In particular, tasks such as electrical outfitting necessitate transport, routing, and fine manipulation of cables across large structures. To address this need, we present a compact and long-reach manipulator incorporating a deployable composite boom, capable of performing manipulation tasks across large structures and workspaces. We characterize the deflection, vibration, and blossoming characteristics inherent to the deployable structure, and present a manipulation control strategy to mitigate these effects. Experiments indicate an average endpoint accuracy error of less than 15 mm for boom lengths up to 1.8 m. We demonstrate the approach with a cable routing task to illustrate the potential for lunar outfitting applications that benefit from long reach.
Multi-Timescale Model Predictive Control for Slow-Fast Systems
Nov 18, 2025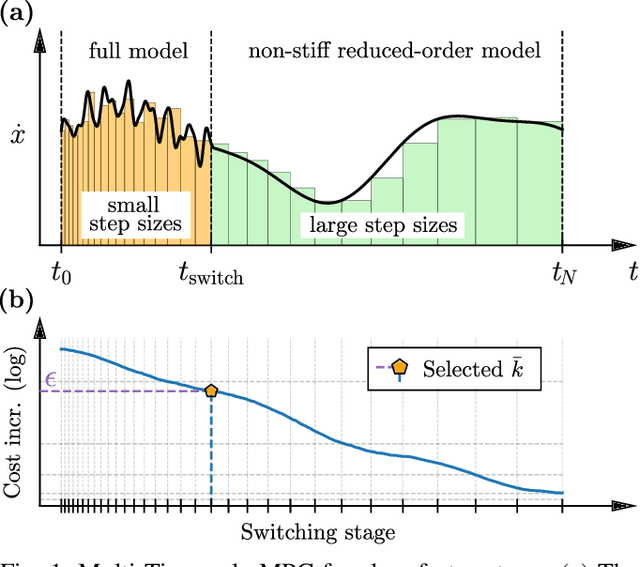
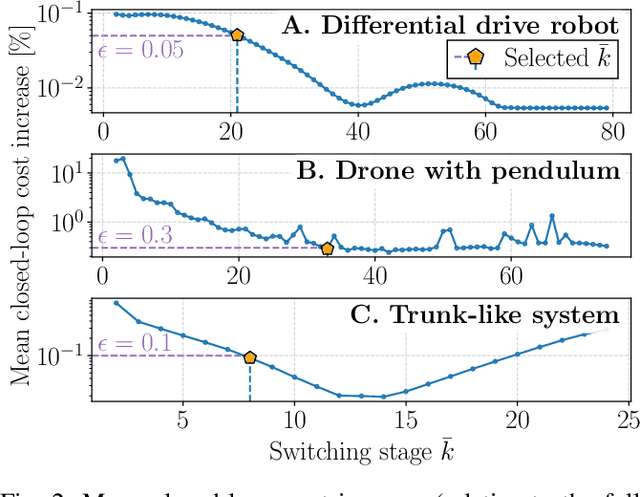
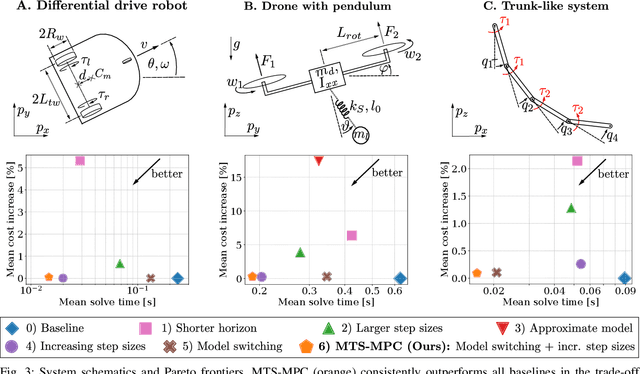
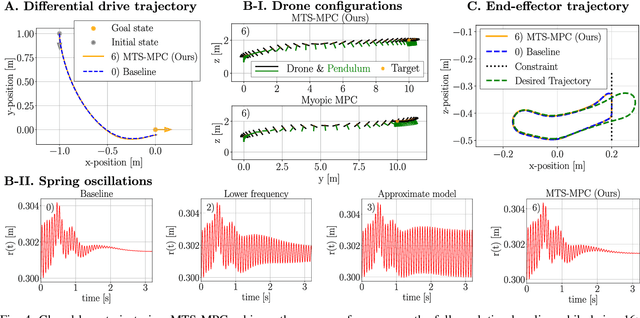
Model Predictive Control (MPC) has established itself as the primary methodology for constrained control, enabling autonomy across diverse applications. While model fidelity is crucial in MPC, solving the corresponding optimization problem in real time remains challenging when combining long horizons with high-fidelity models that capture both short-term dynamics and long-term behavior. Motivated by results on the Exponential Decay of Sensitivities (EDS), which imply that, under certain conditions, the influence of modeling inaccuracies decreases exponentially along the prediction horizon, this paper proposes a multi-timescale MPC scheme for fast-sampled control. Tailored to systems with both fast and slow dynamics, the proposed approach improves computational efficiency by i) switching to a reduced model that captures only the slow, dominant dynamics and ii) exponentially increasing integration step sizes to progressively reduce model detail along the horizon. We evaluate the method on three practically motivated robotic control problems in simulation and observe speed-ups of up to an order of magnitude.
Scan, Materialize, Simulate: A Generalizable Framework for Physically Grounded Robot Planning
May 20, 2025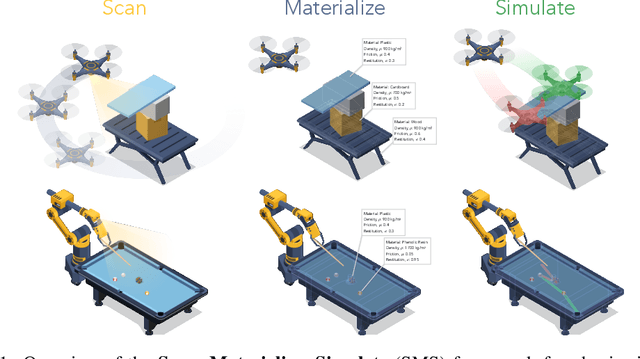
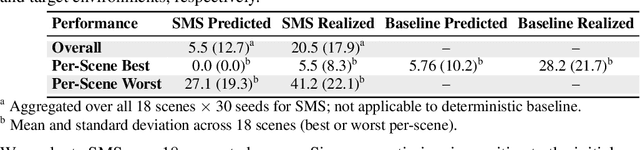


Autonomous robots must reason about the physical consequences of their actions to operate effectively in unstructured, real-world environments. We present Scan, Materialize, Simulate (SMS), a unified framework that combines 3D Gaussian Splatting for accurate scene reconstruction, visual foundation models for semantic segmentation, vision-language models for material property inference, and physics simulation for reliable prediction of action outcomes. By integrating these components, SMS enables generalizable physical reasoning and object-centric planning without the need to re-learn foundational physical dynamics. We empirically validate SMS in a billiards-inspired manipulation task and a challenging quadrotor landing scenario, demonstrating robust performance on both simulated domain transfer and real-world experiments. Our results highlight the potential of bridging differentiable rendering for scene reconstruction, foundation models for semantic understanding, and physics-based simulation to achieve physically grounded robot planning across diverse settings.
Real-Time Out-of-Distribution Failure Prevention via Multi-Modal Reasoning
May 15, 2025



Foundation models can provide robust high-level reasoning on appropriate safety interventions in hazardous scenarios beyond a robot's training data, i.e. out-of-distribution (OOD) failures. However, due to the high inference latency of Large Vision and Language Models, current methods rely on manually defined intervention policies to enact fallbacks, thereby lacking the ability to plan generalizable, semantically safe motions. To overcome these challenges we present FORTRESS, a framework that generates and reasons about semantically safe fallback strategies in real time to prevent OOD failures. At a low frequency in nominal operations, FORTRESS uses multi-modal reasoners to identify goals and anticipate failure modes. When a runtime monitor triggers a fallback response, FORTRESS rapidly synthesizes plans to fallback goals while inferring and avoiding semantically unsafe regions in real time. By bridging open-world, multi-modal reasoning with dynamics-aware planning, we eliminate the need for hard-coded fallbacks and human safety interventions. FORTRESS outperforms on-the-fly prompting of slow reasoning models in safety classification accuracy on synthetic benchmarks and real-world ANYmal robot data, and further improves system safety and planning success in simulation and on quadrotor hardware for urban navigation.
Deformable Cargo Transport in Microgravity with Astrobee
May 02, 2025We present pyastrobee: a simulation environment and control stack for Astrobee in Python, with an emphasis on cargo manipulation and transport tasks. We also demonstrate preliminary success from a sampling-based MPC controller, using reduced-order models of NASA's cargo transfer bag (CTB) to control a high-order deformable finite element model. Our code is open-source, fully documented, and available at https://danielpmorton.github.io/pyastrobee
Safe, Task-Consistent Manipulation with Operational Space Control Barrier Functions
Mar 09, 2025



Safe real-time control of robotic manipulators in unstructured environments requires handling numerous safety constraints without compromising task performance. Traditional approaches, such as artificial potential fields (APFs), suffer from local minima, oscillations, and limited scalability, while model predictive control (MPC) can be computationally expensive. Control barrier functions (CBFs) offer a promising alternative due to their high level of robustness and low computational cost, but these safety filters must be carefully designed to avoid significant reductions in the overall performance of the manipulator. In this work, we introduce an Operational Space Control Barrier Function (OSCBF) framework that integrates safety constraints while preserving task-consistent behavior. Our approach scales to hundreds of simultaneous constraints while retaining real-time control rates, ensuring collision avoidance, singularity prevention, and workspace containment even in highly cluttered and dynamic settings. By explicitly accounting for the task hierarchy in the CBF objective, we prevent degraded performance across both joint-space and operational-space tasks, when at the limit of safety. Our open-source, high-performance software will be available at our project webpage, https://stanfordasl.github.io/oscbf/
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Task-Driven Manipulation with Reconfigurable Parallel Robots
Mar 16, 2024



ReachBot, a proposed robotic platform, employs extendable booms as limbs for mobility in challenging environments, such as martian caves. When attached to the environment, ReachBot acts as a parallel robot, with reconfiguration driven by the ability to detach and re-place the booms. This ability enables manipulation-focused scientific objectives: for instance, through operating tools, or handling and transporting samples. To achieve these capabilities, we develop a two-part solution, optimizing for robustness against task uncertainty and stochastic failure modes. First, we present a mixed-integer stance planner to determine the positioning of ReachBot's booms to maximize the task wrench space about the nominal point(s). Second, we present a convex tension planner to determine boom tensions for the desired task wrenches, accounting for the probabilistic nature of microspine grasping. We demonstrate improvements in key robustness metrics from the field of dexterous manipulation, and show a large increase in the volume of the manipulation workspace. Finally, we employ Monte-Carlo simulation to validate the robustness of these methods, demonstrating good performance across a range of randomized tasks and environments, and generalization to cable-driven morphologies. We make our code available at our project webpage, https://stanfordasl.github.io/reachbot_manipulation/