 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer-based Model Predictive Control: Trajectory Optimization via Sequence Modeling
Oct 31, 2024



Model predictive control (MPC) has established itself as the primary methodology for constrained control, enabling general-purpose robot autonomy in diverse real-world scenarios. However, for most problems of interest, MPC relies on the recursive solution of highly non-convex trajectory optimization problems, leading to high computational complexity and strong dependency on initialization. In this work, we present a unified framework to combine the main strengths of optimization-based and learning-based methods for MPC. Our approach entails embedding high-capacity, transformer-based neural network models within the optimization process for trajectory generation, whereby the transformer provides a near-optimal initial guess, or target plan, to a non-convex optimization problem. Our experiments, performed in simulation and the real world onboard a free flyer platform, demonstrate the capabilities of our framework to improve MPC convergence and runtime. Compared to purely optimization-based approaches, results show that our approach can improve trajectory generation performance by up to 75%, reduce the number of solver iterations by up to 45%, and improve overall MPC runtime by 7x without loss in performance.
* 8 pages, 7 figures. Datasets, videos and code available at: https://transformermpc.github.io
Generalizable Spacecraft Trajectory Generation via Multimodal Learning with Transformers
Oct 15, 2024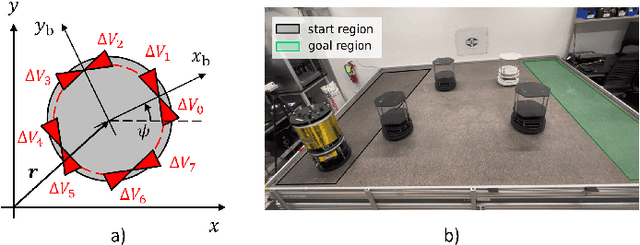
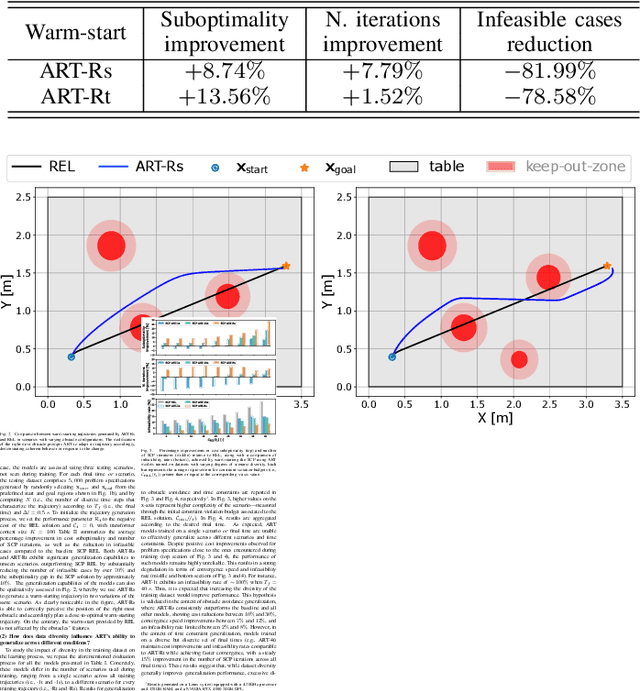
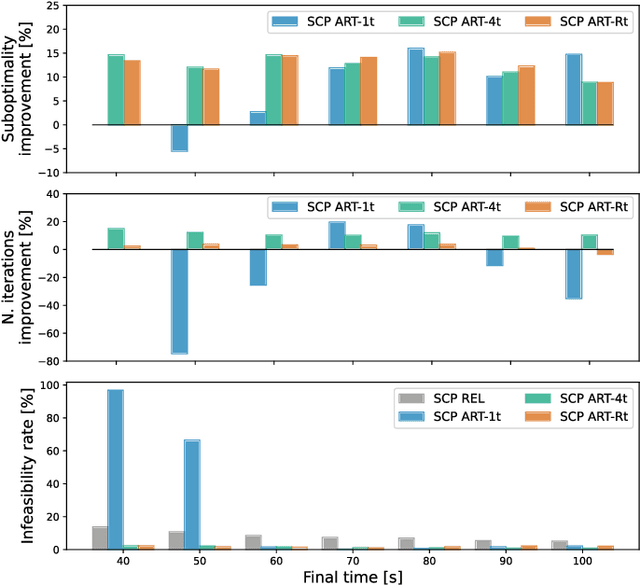
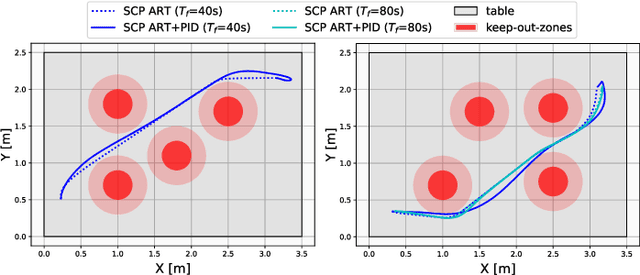
Effective trajectory generation is essential for reliable on-board spacecraft autonomy. Among other approaches, learning-based warm-starting represents an appealing paradigm for solving the trajectory generation problem, effectively combining the benefits of optimization- and data-driven methods. Current approaches for learning-based trajectory generation often focus on fixed, single-scenario environments, where key scene characteristics, such as obstacle positions or final-time requirements, remain constant across problem instances. However, practical trajectory generation requires the scenario to be frequently reconfigured, making the single-scenario approach a potentially impractical solution. To address this challenge, we present a novel trajectory generation framework that generalizes across diverse problem configurations, by leveraging high-capacity transformer neural networks capable of learning from multimodal data sources. Specifically, our approach integrates transformer-based neural network models into the trajectory optimization process, encoding both scene-level information (e.g., obstacle locations, initial and goal states) and trajectory-level constraints (e.g., time bounds, fuel consumption targets) via multimodal representations. The transformer network then generates near-optimal initial guesses for non-convex optimization problems, significantly enhancing convergence speed and performance. The framework is validated through extensive simulations and real-world experiments on a free-flyer platform, achieving up to 30% cost improvement and 80% reduction in infeasible cases with respect to traditional approaches, and demonstrating robust generalization across diverse scenario variations.