 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving GNSS Positioning using Neural Network-based Corrections
Oct 18, 2021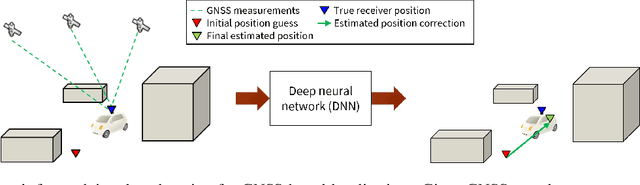
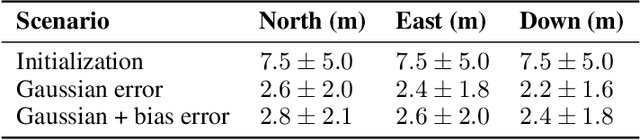


Deep Neural Networks (DNNs) are a promising tool for Global Navigation Satellite System (GNSS) positioning in the presence of multipath and non-line-of-sight errors, owing to their ability to model complex errors using data. However, developing a DNN for GNSS positioning presents various challenges, such as 1) poor numerical conditioning caused by large variations in measurements and position values across the globe, 2) varying number and order within the set of measurements due to changing satellite visibility, and 3) overfitting to available data. In this work, we address the aforementioned challenges and propose an approach for GNSS positioning by applying DNN-based corrections to an initial position guess. Our DNN learns to output the position correction using the set of pseudorange residuals and satellite line-of-sight vectors as inputs. The limited variation in these input and output values improves the numerical conditioning for our DNN. We design our DNN architecture to combine information from the available GNSS measurements, which vary both in number and order, by leveraging recent advancements in set-based deep learning methods. Furthermore, we present a data augmentation strategy for reducing overfitting in the DNN by randomizing the initial position guesses. We first perform simulations and show an improvement in the initial positioning error when our DNN-based corrections are applied. After this, we demonstrate that our approach outperforms a WLS baseline on real-world data. Our implementation is available at github.com/Stanford-NavLab/deep_gnss.
Decentralized Connectivity Maintenance for Multi-robot Systems Under Motion and Sensing Uncertainties
Oct 12, 2021



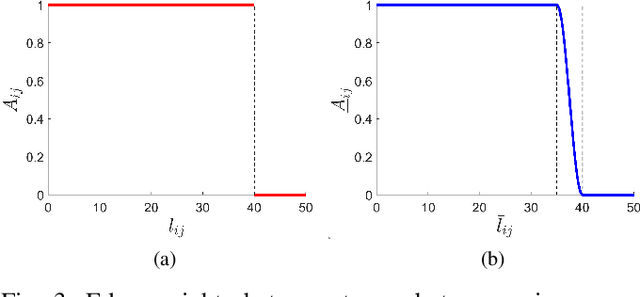
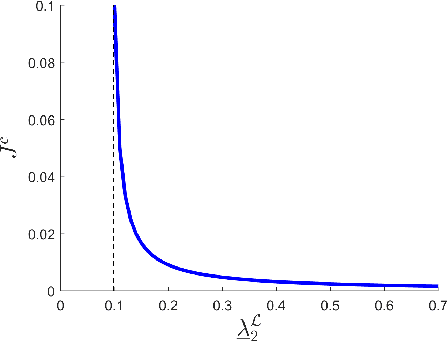
Communication connectivity is desirable for safe and efficient operation of multi-robot systems. While decentralized algorithms for connectivity maintenance have been explored in recent literature, the majority of these works do not account for robot motion and sensing uncertainties. These uncertainties are inherent in practical robots and result in robots deviating from their desired positions which could potentially result in a loss of connectivity. In this paper we present a Decentralized Connectivity Maintenance algorithm accounting for robot motion and sensing Uncertainties (DCMU). We first propose a novel weighted graph definition for the multi-robot system that accounts for the aforementioned uncertainties along with realistic connectivity constraints such as line-of-sight connectivity and collision avoidance. Next we design a decentralized gradient-based controller for connectivity maintenance where we derive the gradients of our weighted graph edge weights required for computing the control. Finally, we perform multiple simulations to validate the connectivity maintenance performance of our DCMU algorithm under robot motion and sensing uncertainties and show an improvement compared to previous work.
Connectivity Maintenance for Multi-Robot Systems Under Motion and Sensing Uncertainties Using Distributed ADMM-based Trajectory Planning
Dec 17, 2020
Inter-robot communication enables multi-robot systems to coordinate and execute complex missions efficiently. Thus, maintaining connectivity of the communication network between robots is essential for many multi-robot systems. In this paper, we present a trajectory planner for connectivity maintenance of a multi-robot system. Unlike previous connectivity maintenance works, we account for motion and sensing uncertainties inherent in practical robots. These uncertainties result in uncertain robot positions which directly affects the connectivity of the system. We first define a metric to quantify the connectivity of a system with uncertain robot positions. This metric is used to design our trajectory planner based on a distributed alternating direction method of multipliers (ADMM) framework. Next, we derive an approximation for the Hessian matrices required within the ADMM optimization step to reduce the computational load. Finally, simulation results are presented to statistically validate the connectivity maintenance of our trajectory planner.
Trajectory Planning Under Stochastic and Bounded Sensing Uncertainties Using Reachability Analysis
Dec 17, 2020



Trajectory planning under uncertainty is an active research topic. Previous works predict state and state estimation uncertainties along trajectories to check for collision safety. They assume either stochastic or bounded sensing uncertainties. However, GNSS pseudoranges are typically modeled to contain stochastic uncertainties with additional biases in urban environments. Thus, given bounds for the bias, the planner needs to account for both stochastic and bounded sensing uncertainties. In our prior work we presented a reachability analysis to predict state and state estimation uncertainties under stochastic and bounded uncertainties. However, we ignored the correlation between these uncertainties, leading to an imperfect approximation of the state uncertainty. In this paper we improve our reachability analysis by predicting state uncertainty as a function of independent quantities. We design a metric for the predicted uncertainty to compare candidate trajectories during planning. Finally, we validate the planner for GNSS-based urban navigation of fixed-wing UAS.
UAV Pose Estimation using Cross-view Geolocalization with Satellite Imagery
Sep 16, 2018



We propose an image-based cross-view geolocalization method that estimates the global pose of a UAV with the aid of georeferenced satellite imagery. Our method consists of two Siamese neural networks that extract relevant features despite large differences in viewpoints. The input to our method is an aerial UAV image and nearby satellite images, and the output is the weighted global pose estimate of the UAV camera. We also present a framework to integrate our cross-view geolocalization output with visual odometry through a Kalman filter. We build a dataset of simulated UAV images and satellite imagery to train and test our networks. We show that our method performs better than previous camera pose estimation methods, and we demonstrate our networks ability to generalize well to test datasets with unseen images. Finally, we show that integrating our method with visual odometry significantly reduces trajectory estimation errors.