 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnectivity Maintenance for Multi-Robot Systems Under Motion and Sensing Uncertainties Using Distributed ADMM-based Trajectory Planning
Paper and Code
Dec 17, 2020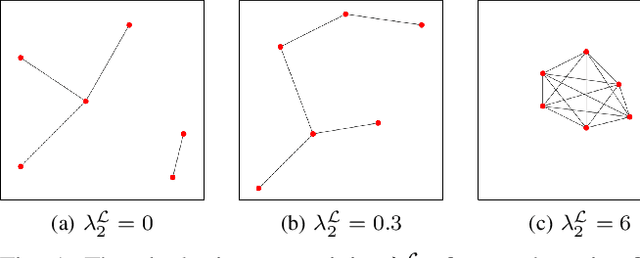
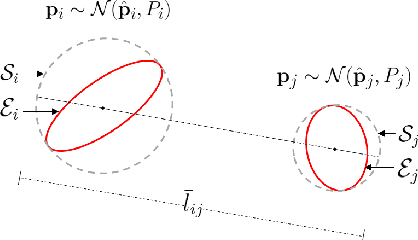
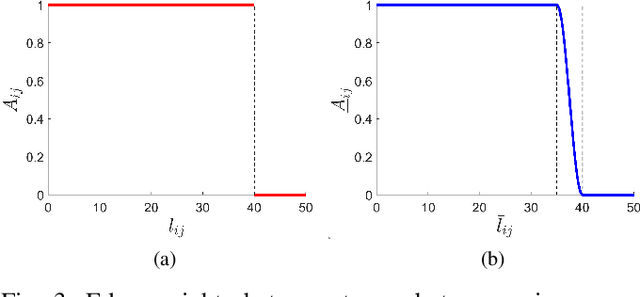
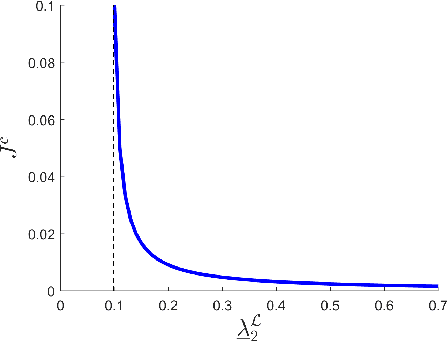
Inter-robot communication enables multi-robot systems to coordinate and execute complex missions efficiently. Thus, maintaining connectivity of the communication network between robots is essential for many multi-robot systems. In this paper, we present a trajectory planner for connectivity maintenance of a multi-robot system. Unlike previous connectivity maintenance works, we account for motion and sensing uncertainties inherent in practical robots. These uncertainties result in uncertain robot positions which directly affects the connectivity of the system. We first define a metric to quantify the connectivity of a system with uncertain robot positions. This metric is used to design our trajectory planner based on a distributed alternating direction method of multipliers (ADMM) framework. Next, we derive an approximation for the Hessian matrices required within the ADMM optimization step to reduce the computational load. Finally, simulation results are presented to statistically validate the connectivity maintenance of our trajectory planner.