 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Particle Filtering Framework for Integrity Risk of GNSS-Camera Sensor Fusion
Jan 15, 2021



Adopting a joint approach towards state estimation and integrity monitoring results in unbiased integrity monitoring unlike traditional approaches. So far, a joint approach was used in Particle RAIM [l] for GNSS measurements only. In our work, we extend Particle RAIM to a GNSS-camera fused system for joint state estimation and integrity monitoring. To account for vision faults, we derive a probability distribution over position from camera images using map-matching. We formulate a Kullback-Leibler Divergence metric to assess the consistency of GNSS and camera measurements and mitigate faults during sensor fusion. The derived integrity risk upper bounds the probability of Hazardously Misleading Information (HMI). Experimental validation on a real-world dataset shows that our algorithm produces less than 11 m position error and the integrity risk over bounds the probability of HMI with 0.11 failure rate for an 8 m Alert Limit in an urban scenario.
Robust GPS-Vision Localization via Integrity-Driven Landmark Attention
Jan 13, 2021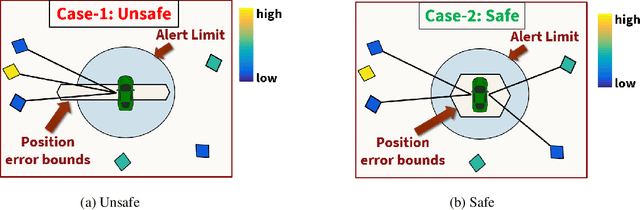
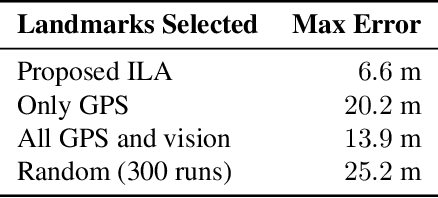
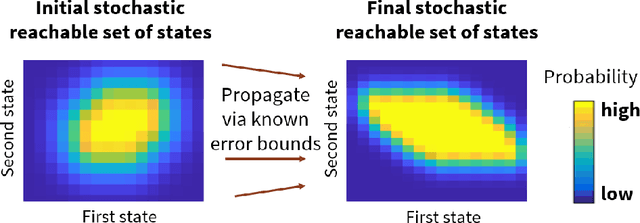
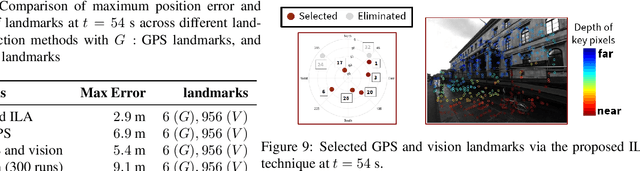
For robust GPS-vision navigation in urban areas, we propose an Integrity-driven Landmark Attention (ILA) technique via stochastic reachability. Inspired by cognitive attention in humans, we perform convex optimization to select a subset of landmarks from GPS and vision measurements that maximizes integrity-driven performance. Given known measurement error bounds in non-faulty conditions, our ILA follows a unified approach to address both GPS and vision faults and is compatible with any off-the-shelf estimator. We analyze measurement deviation to estimate the stochastic reachable set of expected position for each landmark, which is parameterized via probabilistic zonotope (p-Zonotope). We apply set union to formulate a p-Zonotopic cost that represents the size of position bounds based on landmark inclusion/exclusion. We jointly minimize the p-Zonotopic cost and maximize the number of landmarks via convex relaxation. For an urban dataset, we demonstrate improved localization accuracy and robust predicted availability for a pre-defined alert limit.
GPS Spoofing Mitigation and Timing Risk Analysis in Networked PMUs via Stochastic Reachability
Jan 13, 2021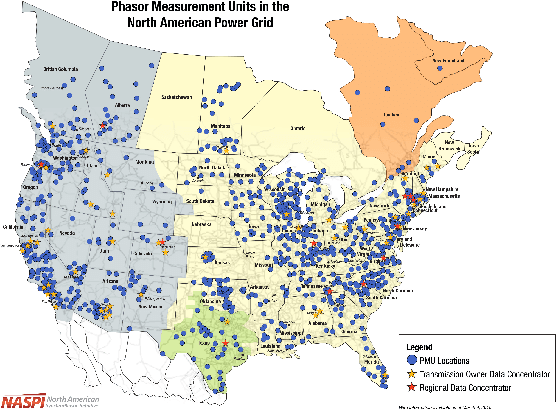
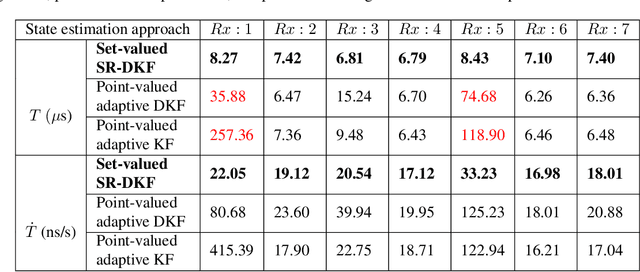
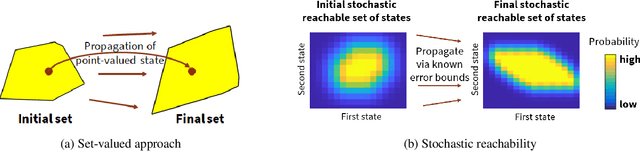
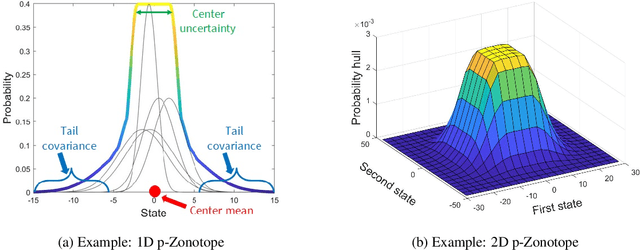
To address PMU vulnerability against spoofing, we propose a set-valued state estimation technique known as Stochastic Reachability-based Distributed Kalman Filter (SR-DKF) that computes secure GPS timing across a network of receivers. Utilizing stochastic reachability, we estimate not only GPS time but also its stochastic reachable set, which is parameterized via probabilistic zonotope (p-Zonotope). While requiring known measurement error bounds in only non-spoofed conditions, we design a two-tier approach: We first perform measurement-level spoofing mitigation via deviation of measurement innovation from its expected p-Zonotope and second perform state-level timing risk analysis via intersection probability of estimated pZonotope with an unsafe set that violates IEEE C37.118.1a-2014 standards. We validate the proposed SR-DKF by subjecting a simulated receiver network to coordinated signal-level spoofing. We demonstrate improved GPS timing accuracy and successful spoofing mitigation via our SR-DKF. We validate the robustness of the estimated timing risk as the number of receivers is varied.
Learning Low-Correlation GPS Spreading Codes with a Policy Gradient Algorithm
Jan 08, 2021
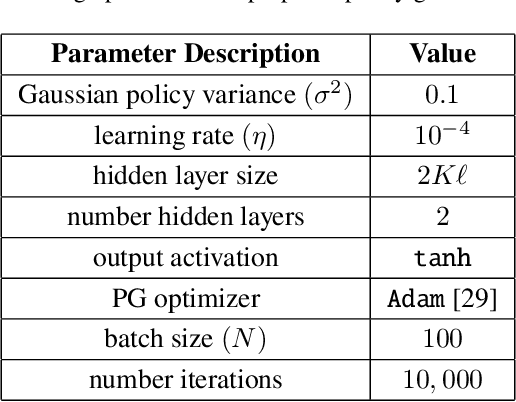
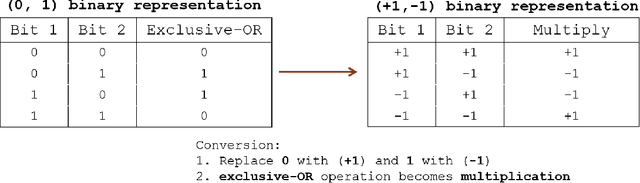
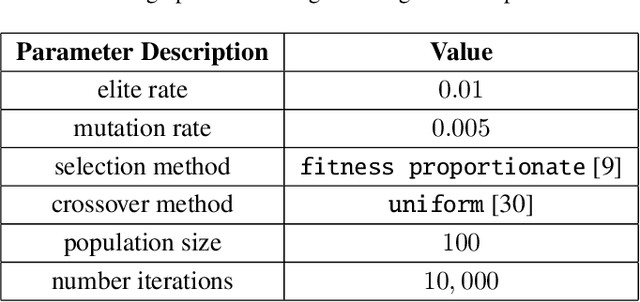
With the birth of the next-generation GPS III constellation and the upcoming launch of the Navigation Technology Satellite-3 (NTS-3) testing platform to explore future technologies for GPS, we are indeed entering a new era of satellite navigation. Correspondingly, it is time to revisit the design methods of the GPS spreading code families. In this work, we develop a Gaussian policy gradient-based reinforcement learning algorithm which constructs high-quality families of spreading code sequences. We demonstrate the ability of our algorithm to achieve better mean-squared auto- and cross-correlation than well-chosen families of equal-length Gold codes and Weil codes. Furthermore, we compare our algorithm with an analogous genetic algorithm implementation assigned the same code evaluation metric. To the best of the authors' knowledge, this is the first work to explore using a machine learning / reinforcement learning approach to design navigation spreading codes.
Connectivity Maintenance for Multi-Robot Systems Under Motion and Sensing Uncertainties Using Distributed ADMM-based Trajectory Planning
Dec 17, 2020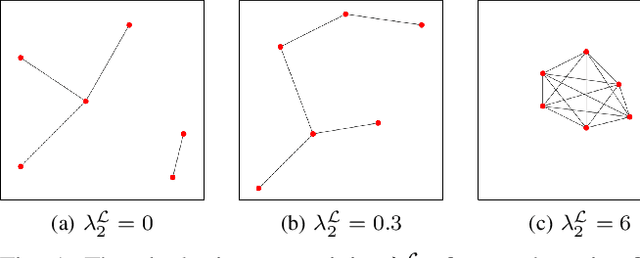
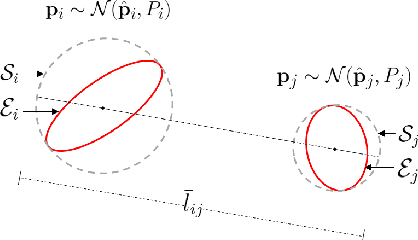
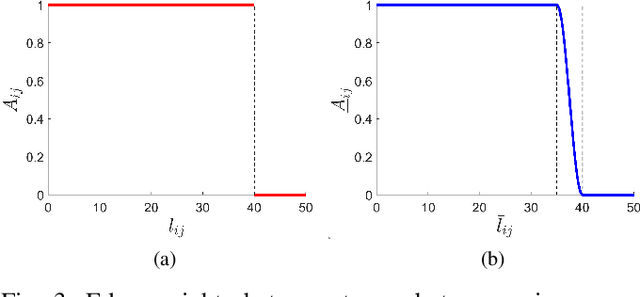
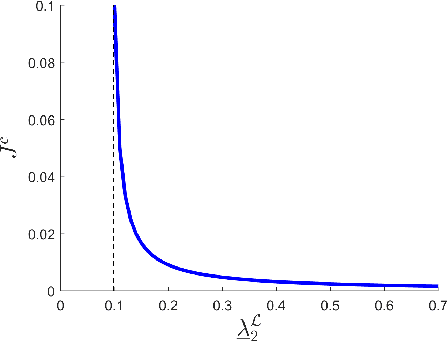
Inter-robot communication enables multi-robot systems to coordinate and execute complex missions efficiently. Thus, maintaining connectivity of the communication network between robots is essential for many multi-robot systems. In this paper, we present a trajectory planner for connectivity maintenance of a multi-robot system. Unlike previous connectivity maintenance works, we account for motion and sensing uncertainties inherent in practical robots. These uncertainties result in uncertain robot positions which directly affects the connectivity of the system. We first define a metric to quantify the connectivity of a system with uncertain robot positions. This metric is used to design our trajectory planner based on a distributed alternating direction method of multipliers (ADMM) framework. Next, we derive an approximation for the Hessian matrices required within the ADMM optimization step to reduce the computational load. Finally, simulation results are presented to statistically validate the connectivity maintenance of our trajectory planner.
Trajectory Planning Under Stochastic and Bounded Sensing Uncertainties Using Reachability Analysis
Dec 17, 2020



Trajectory planning under uncertainty is an active research topic. Previous works predict state and state estimation uncertainties along trajectories to check for collision safety. They assume either stochastic or bounded sensing uncertainties. However, GNSS pseudoranges are typically modeled to contain stochastic uncertainties with additional biases in urban environments. Thus, given bounds for the bias, the planner needs to account for both stochastic and bounded sensing uncertainties. In our prior work we presented a reachability analysis to predict state and state estimation uncertainties under stochastic and bounded uncertainties. However, we ignored the correlation between these uncertainties, leading to an imperfect approximation of the state uncertainty. In this paper we improve our reachability analysis by predicting state uncertainty as a function of independent quantities. We design a metric for the predicted uncertainty to compare candidate trajectories during planning. Finally, we validate the planner for GNSS-based urban navigation of fixed-wing UAS.
SLAM-based Integrity Monitoring Using GPS and Fish-eye Camera
Oct 04, 2019
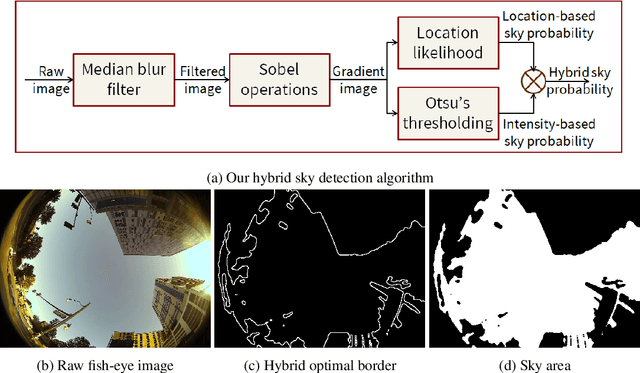
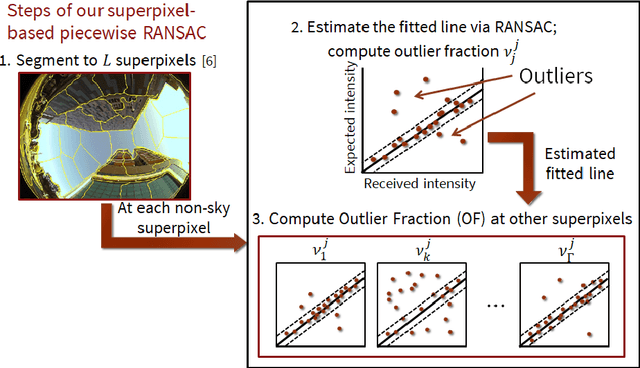
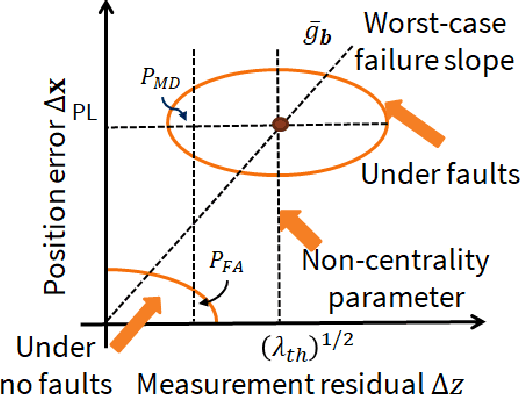
Urban navigation using GPS and fish-eye camera suffers from multipath effects in GPS measurements and data association errors in pixel intensities across image frames. We propose a Simultaneous Localization and Mapping (SLAM)-based Integrity Monitoring (IM) algorithm to compute the position protection levels while accounting for multiple faults in both GPS and vision. We perform graph optimization using the sequential data of GPS pseudoranges, pixel intensities, vehicle dynamics, and satellite ephemeris to simultaneously localize the vehicle as well as the landmarks, namely GPS satellites and key image pixels in the world frame. We estimate the fault mode vector by analyzing the temporal correlation across the GPS measurement residuals and spatial correlation across the vision intensity residuals. In particular, to detect and isolate the vision faults, we developed a superpixel-based piecewise Random Sample Consensus (RANSAC) technique to perform spatial voting across image pixels. For an estimated fault mode, we compute the protection levels by applying worst-case failure slope analysis to the linearized Graph-SLAM framework. We perform ground vehicle experiments in the semi-urban area of Champaign, IL and have demonstrated the successful detection and isolation of multiple faults. We also validate tighter protection levels and lower localization errors achieved via the proposed algorithm as compared to SLAM-based IM that utilizes only GPS measurements.
UAV Pose Estimation using Cross-view Geolocalization with Satellite Imagery
Sep 16, 2018



We propose an image-based cross-view geolocalization method that estimates the global pose of a UAV with the aid of georeferenced satellite imagery. Our method consists of two Siamese neural networks that extract relevant features despite large differences in viewpoints. The input to our method is an aerial UAV image and nearby satellite images, and the output is the weighted global pose estimate of the UAV camera. We also present a framework to integrate our cross-view geolocalization output with visual odometry through a Kalman filter. We build a dataset of simulated UAV images and satellite imagery to train and test our networks. We show that our method performs better than previous camera pose estimation methods, and we demonstrate our networks ability to generalize well to test datasets with unseen images. Finally, we show that integrating our method with visual odometry significantly reduces trajectory estimation errors.