 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAM-based Integrity Monitoring Using GPS and Fish-eye Camera
Paper and Code
Oct 04, 2019
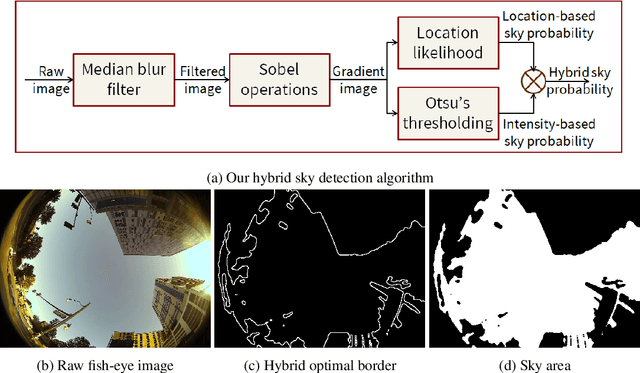
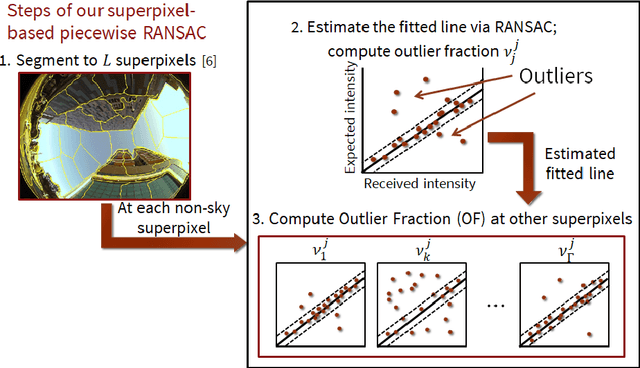
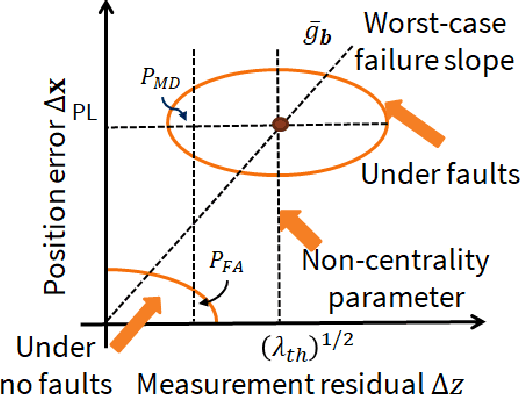
Urban navigation using GPS and fish-eye camera suffers from multipath effects in GPS measurements and data association errors in pixel intensities across image frames. We propose a Simultaneous Localization and Mapping (SLAM)-based Integrity Monitoring (IM) algorithm to compute the position protection levels while accounting for multiple faults in both GPS and vision. We perform graph optimization using the sequential data of GPS pseudoranges, pixel intensities, vehicle dynamics, and satellite ephemeris to simultaneously localize the vehicle as well as the landmarks, namely GPS satellites and key image pixels in the world frame. We estimate the fault mode vector by analyzing the temporal correlation across the GPS measurement residuals and spatial correlation across the vision intensity residuals. In particular, to detect and isolate the vision faults, we developed a superpixel-based piecewise Random Sample Consensus (RANSAC) technique to perform spatial voting across image pixels. For an estimated fault mode, we compute the protection levels by applying worst-case failure slope analysis to the linearized Graph-SLAM framework. We perform ground vehicle experiments in the semi-urban area of Champaign, IL and have demonstrated the successful detection and isolation of multiple faults. We also validate tighter protection levels and lower localization errors achieved via the proposed algorithm as compared to SLAM-based IM that utilizes only GPS measurements.