 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSet-Valued Shadow Matching Using Zonotopes for 3-D Map-Aided GNSS Localization
Sep 28, 2022


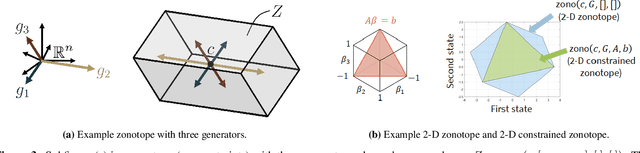
Unlike many urban localization methods that return point-valued estimates, a set-valued representation enables robustness by ensuring that a continuum of possible positions obeys safety constraints. One strategy with the potential for set-valued estimation is GNSS-based shadow matching~(SM), where one uses a three-dimensional (3-D) map to compute GNSS shadows (where line-of-sight is blocked). However, SM requires a point-valued grid for computational tractability, with accuracy limited by grid resolution. We propose zonotope shadow matching (ZSM) for set-valued 3-D map-aided GNSS localization. ZSM represents buildings and GNSS shadows using constrained zonotopes, a convex polytope representation that enables propagating set-valued estimates using fast vector concatenation operations. Starting from a coarse set-valued position, ZSM refines the estimate depending on the receiver being inside or outside each shadow as judged by received carrier-to-noise density. We demonstrated our algorithm's performance using simulated experiments on a simple 3-D example map and on a dense 3-D map of San Francisco.
A Case Study Analysis for Designing a Lunar Navigation Satellite System with Time-Transfer from Earth-GPS
Jan 03, 2022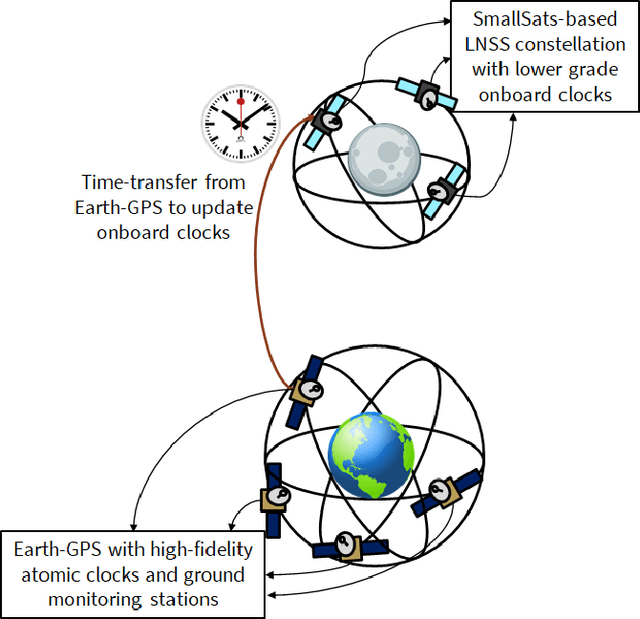

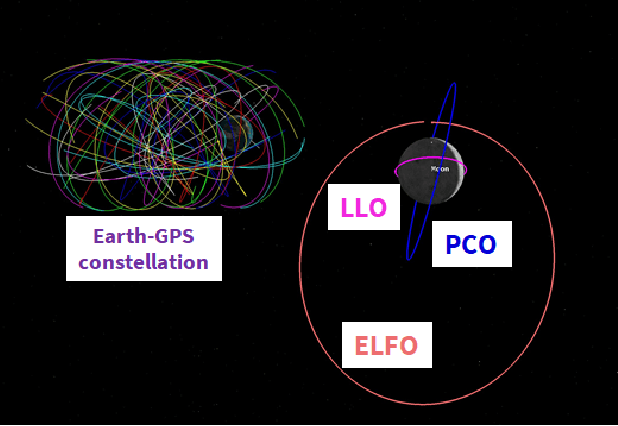
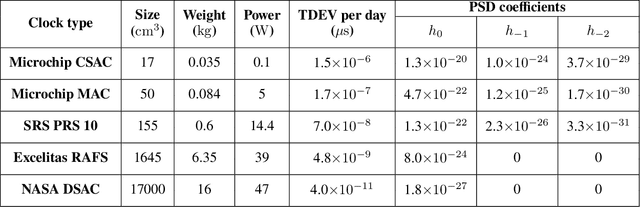
Recently, there has been a growing interest in the use of a SmallSat platform for the future Lunar Navigation Satellite System (LNSS) to allow for cost-effectiveness and rapid deployment. However, many design choices are yet to be finalized for the SmallSat-based LNSS, including the onboard clock and the orbit type. As compared to the legacy Earth-GPS, designing an LNSS poses unique challenges: (a) restricted Size, Weight, and Power (SWaP) of the onboard clock, which limits the timing stability; (b) limited lunar ground monitoring stations, which engenders a greater preference toward stable LNSS satellite orbits. In this current work, we analyze the trade-off between different design considerations related to the onboard clock and the lunar orbit type for designing an LNSS with time-transfer from Earth-GPS. Our proposed time-transfer architecture combines the intermittently available Earth-GPS signals in a timing filter to alleviate the cost and SWaP requirements of the onboard clocks. Specifically, we conduct multiple case studies with different grades of low-SWaP clocks and various previously studied lunar orbit types. We estimate the lunar User Equivalent Range Error (UERE) metric to characterize the ranging accuracy of signals transmitted from an LNSS satellite. Using the Systems Tool Kit (STK)-based simulation setup from Analytical Graphics, Inc. (AGI), we evaluate the lunar UERE across various case studies of the LNSS design to demonstrate comparable performance as that of the legacy Earth-GPS, even while using a low-SWaP onboard clock. We further perform sensitivity analysis to investigate the variation in the lunar UERE metric across different case studies as the Earth-GPS measurement update rates are varied.
Robust GPS-Vision Localization via Integrity-Driven Landmark Attention
Jan 13, 2021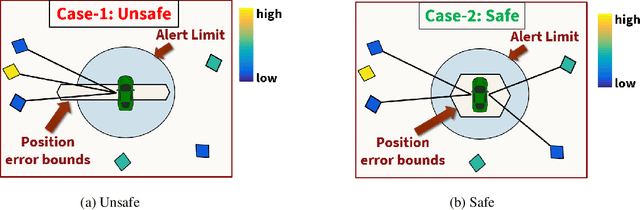
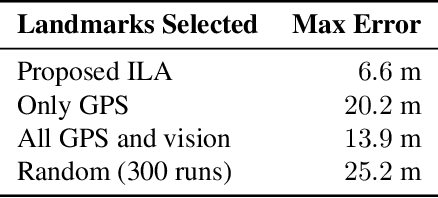
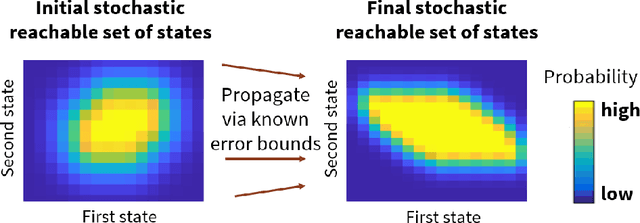
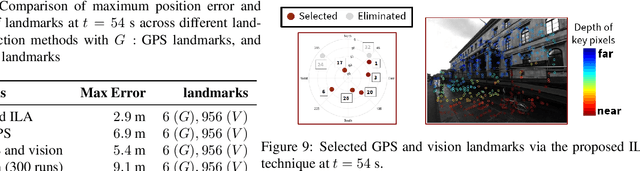
For robust GPS-vision navigation in urban areas, we propose an Integrity-driven Landmark Attention (ILA) technique via stochastic reachability. Inspired by cognitive attention in humans, we perform convex optimization to select a subset of landmarks from GPS and vision measurements that maximizes integrity-driven performance. Given known measurement error bounds in non-faulty conditions, our ILA follows a unified approach to address both GPS and vision faults and is compatible with any off-the-shelf estimator. We analyze measurement deviation to estimate the stochastic reachable set of expected position for each landmark, which is parameterized via probabilistic zonotope (p-Zonotope). We apply set union to formulate a p-Zonotopic cost that represents the size of position bounds based on landmark inclusion/exclusion. We jointly minimize the p-Zonotopic cost and maximize the number of landmarks via convex relaxation. For an urban dataset, we demonstrate improved localization accuracy and robust predicted availability for a pre-defined alert limit.
GPS Spoofing Mitigation and Timing Risk Analysis in Networked PMUs via Stochastic Reachability
Jan 13, 2021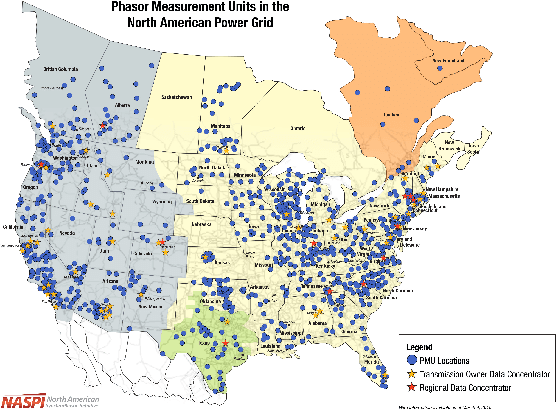
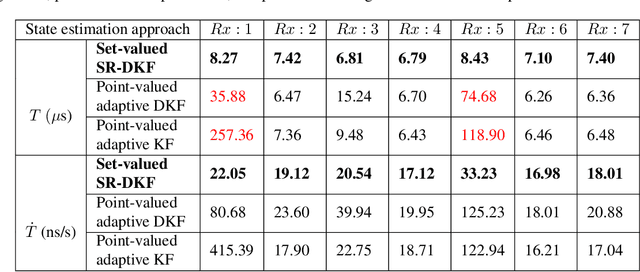
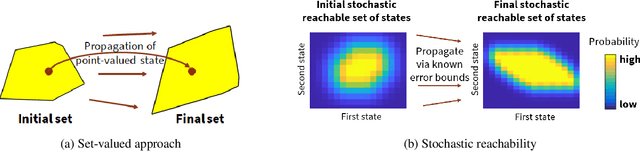
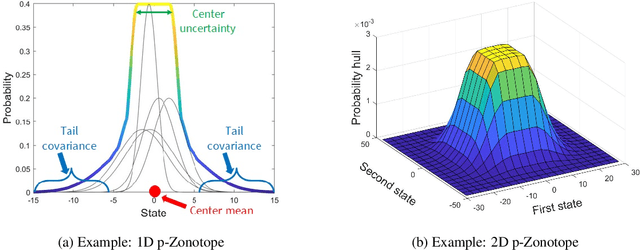
To address PMU vulnerability against spoofing, we propose a set-valued state estimation technique known as Stochastic Reachability-based Distributed Kalman Filter (SR-DKF) that computes secure GPS timing across a network of receivers. Utilizing stochastic reachability, we estimate not only GPS time but also its stochastic reachable set, which is parameterized via probabilistic zonotope (p-Zonotope). While requiring known measurement error bounds in only non-spoofed conditions, we design a two-tier approach: We first perform measurement-level spoofing mitigation via deviation of measurement innovation from its expected p-Zonotope and second perform state-level timing risk analysis via intersection probability of estimated pZonotope with an unsafe set that violates IEEE C37.118.1a-2014 standards. We validate the proposed SR-DKF by subjecting a simulated receiver network to coordinated signal-level spoofing. We demonstrate improved GPS timing accuracy and successful spoofing mitigation via our SR-DKF. We validate the robustness of the estimated timing risk as the number of receivers is varied.
SLAM-based Integrity Monitoring Using GPS and Fish-eye Camera
Oct 04, 2019
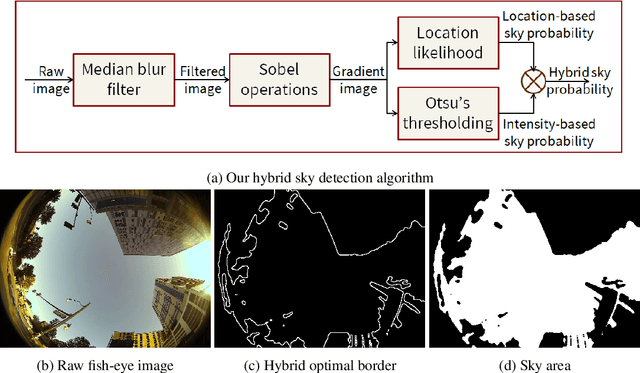
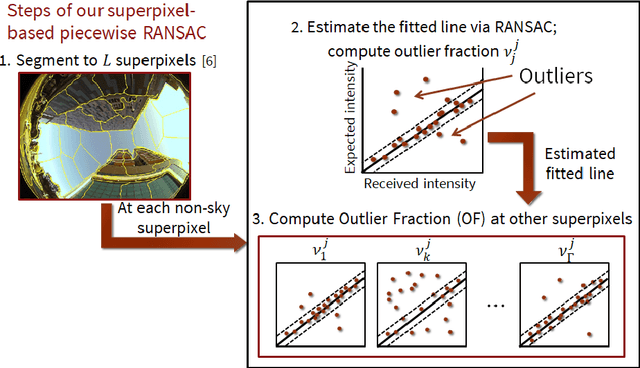
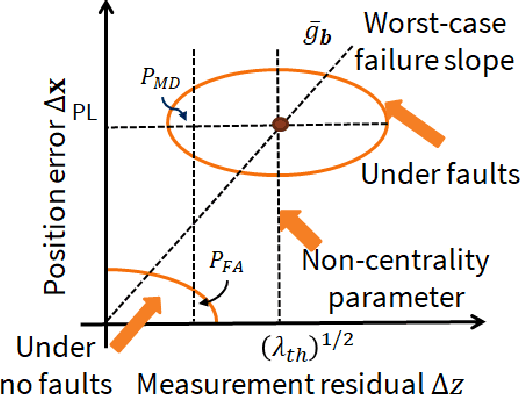
Urban navigation using GPS and fish-eye camera suffers from multipath effects in GPS measurements and data association errors in pixel intensities across image frames. We propose a Simultaneous Localization and Mapping (SLAM)-based Integrity Monitoring (IM) algorithm to compute the position protection levels while accounting for multiple faults in both GPS and vision. We perform graph optimization using the sequential data of GPS pseudoranges, pixel intensities, vehicle dynamics, and satellite ephemeris to simultaneously localize the vehicle as well as the landmarks, namely GPS satellites and key image pixels in the world frame. We estimate the fault mode vector by analyzing the temporal correlation across the GPS measurement residuals and spatial correlation across the vision intensity residuals. In particular, to detect and isolate the vision faults, we developed a superpixel-based piecewise Random Sample Consensus (RANSAC) technique to perform spatial voting across image pixels. For an estimated fault mode, we compute the protection levels by applying worst-case failure slope analysis to the linearized Graph-SLAM framework. We perform ground vehicle experiments in the semi-urban area of Champaign, IL and have demonstrated the successful detection and isolation of multiple faults. We also validate tighter protection levels and lower localization errors achieved via the proposed algorithm as compared to SLAM-based IM that utilizes only GPS measurements.