 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparScene: Efficient Traffic Scene Representation via Sparse Graph Learning for Large-Scale Trajectory Generation
Dec 24, 2025Multi-agent trajectory generation is a core problem for autonomous driving and intelligent transportation systems. However, efficiently modeling the dynamic interactions between numerous road users and infrastructures in complex scenes remains an open problem. Existing methods typically employ distance-based or fully connected dense graph structures to capture interaction information, which not only introduces a large number of redundant edges but also requires complex and heavily parameterized networks for encoding, thereby resulting in low training and inference efficiency, limiting scalability to large and complex traffic scenes. To overcome the limitations of existing methods, we propose SparScene, a sparse graph learning framework designed for efficient and scalable traffic scene representation. Instead of relying on distance thresholds, SparScene leverages the lane graph topology to construct structure-aware sparse connections between agents and lanes, enabling efficient yet informative scene graph representation. SparScene adopts a lightweight graph encoder that efficiently aggregates agent-map and agent-agent interactions, yielding compact scene representations with substantially improved efficiency and scalability. On the motion prediction benchmark of the Waymo Open Motion Dataset (WOMD), SparScene achieves competitive performance with remarkable efficiency. It generates trajectories for more than 200 agents in a scene within 5 ms and scales to more than 5,000 agents and 17,000 lanes with merely 54 ms of inference time with a GPU memory of 2.9 GB, highlighting its superior scalability for large-scale traffic scenes.
Group Distributionally Robust Machine Learning under Group Level Distributional Uncertainty
Sep 10, 2025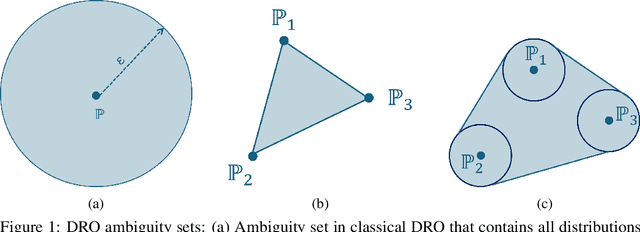

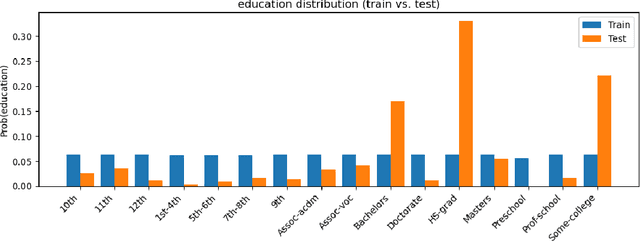
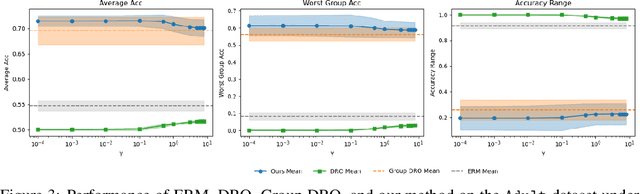
The performance of machine learning (ML) models critically depends on the quality and representativeness of the training data. In applications with multiple heterogeneous data generating sources, standard ML methods often learn spurious correlations that perform well on average but degrade performance for atypical or underrepresented groups. Prior work addresses this issue by optimizing the worst-group performance. However, these approaches typically assume that the underlying data distributions for each group can be accurately estimated using the training data, a condition that is frequently violated in noisy, non-stationary, and evolving environments. In this work, we propose a novel framework that relies on Wasserstein-based distributionally robust optimization (DRO) to account for the distributional uncertainty within each group, while simultaneously preserving the objective of improving the worst-group performance. We develop a gradient descent-ascent algorithm to solve the proposed DRO problem and provide convergence results. Finally, we validate the effectiveness of our method on real-world data.
Closed-Loop Neural Operator-Based Observer of Traffic Density
Apr 07, 2025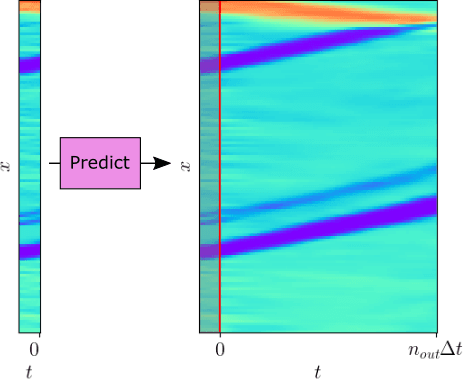
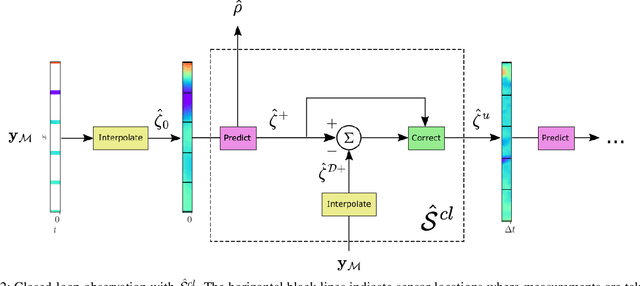
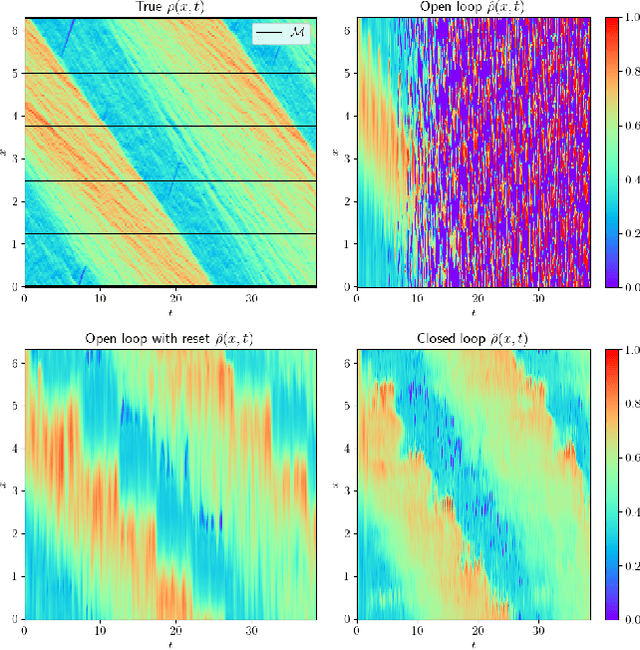
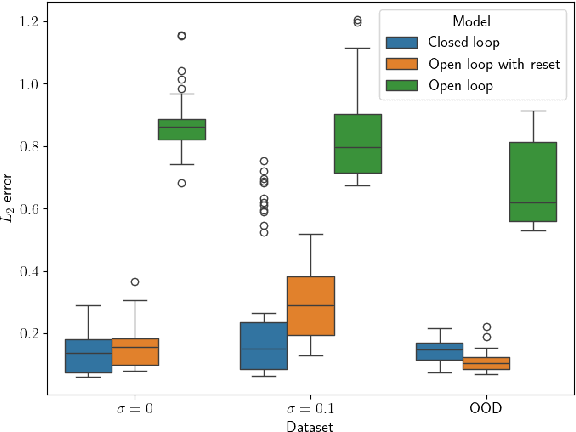
We consider the problem of traffic density estimation with sparse measurements from stationary roadside sensors. Our approach uses Fourier neural operators to learn macroscopic traffic flow dynamics from high-fidelity microscopic-level simulations. During inference, the operator functions as an open-loop predictor of traffic evolution. To close the loop, we couple the open-loop operator with a correction operator that combines the predicted density with sparse measurements from the sensors. Simulations with the SUMO software indicate that, compared to open-loop observers, the proposed closed-loop observer exhibit classical closed-loop properties such as robustness to noise and ultimate boundedness of the error. This shows the advantages of combining learned physics with real-time corrections, and opens avenues for accurate, efficient, and interpretable data-driven observers.
Online Traffic Density Estimation using Physics-Informed Neural Networks
Apr 04, 2025Recent works on the application of Physics-Informed Neural Networks to traffic density estimation have shown to be promising for future developments due to their robustness to model errors and noisy data. In this paper, we introduce a methodology for online approximation of the traffic density using measurements from probe vehicles in two settings: one using the Greenshield model and the other considering a high-fidelity traffic simulation. The proposed method continuously estimates the real-time traffic density in space and performs model identification with each new set of measurements. The density estimate is updated in almost real-time using gradient descent and adaptive weights. In the case of full model knowledge, the resulting algorithm has similar performance to the classical open-loop one. However, in the case of model mismatch, the iterative solution behaves as a closed-loop observer and outperforms the baseline method. Similarly, in the high-fidelity setting, the proposed algorithm correctly reproduces the traffic characteristics.
KKL Observer Synthesis for Nonlinear Systems via Physics-Informed Learning
Jan 20, 2025This paper proposes a novel learning approach for designing Kazantzis-Kravaris/Luenberger (KKL) observers for autonomous nonlinear systems. The design of a KKL observer involves finding an injective map that transforms the system state into a higher-dimensional observer state, whose dynamics is linear and stable. The observer's state is then mapped back to the original system coordinates via the inverse map to obtain the state estimate. However, finding this transformation and its inverse is quite challenging. We propose to sequentially approximate these maps by neural networks that are trained using physics-informed learning. We generate synthetic data for training by numerically solving the system and observer dynamics. Theoretical guarantees for the robustness of state estimation against approximation error and system uncertainties are provided. Additionally, a systematic method for optimizing observer performance through parameter selection is presented. The effectiveness of the proposed approach is demonstrated through numerical simulations on benchmark examples and its application to sensor fault detection and isolation in a network of Kuramoto oscillators using learned KKL observers.
Explainable Reinforcement Learning via Temporal Policy Decomposition
Jan 07, 2025



We investigate the explainability of Reinforcement Learning (RL) policies from a temporal perspective, focusing on the sequence of future outcomes associated with individual actions. In RL, value functions compress information about rewards collected across multiple trajectories and over an infinite horizon, allowing a compact form of knowledge representation. However, this compression obscures the temporal details inherent in sequential decision-making, presenting a key challenge for interpretability. We present Temporal Policy Decomposition (TPD), a novel explainability approach that explains individual RL actions in terms of their Expected Future Outcome (EFO). These explanations decompose generalized value functions into a sequence of EFOs, one for each time step up to a prediction horizon of interest, revealing insights into when specific outcomes are expected to occur. We leverage fixed-horizon temporal difference learning to devise an off-policy method for learning EFOs for both optimal and suboptimal actions, enabling contrastive explanations consisting of EFOs for different state-action pairs. Our experiments demonstrate that TPD generates accurate explanations that (i) clarify the policy's future strategy and anticipated trajectory for a given action and (ii) improve understanding of the reward composition, facilitating fine-tuning of the reward function to align with human expectations.
Risk-averse learning with delayed feedback
Sep 25, 2024



In real-world scenarios, the impacts of decisions may not manifest immediately. Taking these delays into account facilitates accurate assessment and management of risk in real-world environments, thereby ensuring the efficacy of strategies. In this paper, we investigate risk-averse learning using Conditional Value at Risk (CVaR) as risk measure, while incorporating delayed feedback with unknown but bounded delays. We develop two risk-averse learning algorithms that rely on one-point and two-point zeroth-order optimization approaches, respectively. The regret achieved by the algorithms is analyzed in terms of the cumulative delay and the number of total samplings. The results suggest that the two-point risk-averse learning achieves a smaller regret bound than the one-point algorithm. Furthermore, the one-point risk-averse learning algorithm attains sublinear regret under certain delay conditions, and the two-point risk-averse learning algorithm achieves sublinear regret with minimal restrictions on the delay. We provide numerical experiments on a dynamic pricing problem to demonstrate the performance of the proposed algorithms.
Federated Cubic Regularized Newton Learning with Sparsification-amplified Differential Privacy
Aug 08, 2024

This paper investigates the use of the cubic-regularized Newton method within a federated learning framework while addressing two major concerns that commonly arise in federated learning: privacy leakage and communication bottleneck. We introduce a federated learning algorithm called Differentially Private Federated Cubic Regularized Newton (DP-FCRN). By leveraging second-order techniques, our algorithm achieves lower iteration complexity compared to first-order methods. We also incorporate noise perturbation during local computations to ensure privacy. Furthermore, we employ sparsification in uplink transmission, which not only reduces the communication costs but also amplifies the privacy guarantee. Specifically, this approach reduces the necessary noise intensity without compromising privacy protection. We analyze the convergence properties of our algorithm and establish the privacy guarantee. Finally, we validate the effectiveness of the proposed algorithm through experiments on a benchmark dataset.
Real-time Hybrid System Identification with Online Deterministic Annealing
Aug 03, 2024



We introduce a real-time identification method for discrete-time state-dependent switching systems in both the input--output and state-space domains. In particular, we design a system of adaptive algorithms running in two timescales; a stochastic approximation algorithm implements an online deterministic annealing scheme at a slow timescale and estimates the mode-switching signal, and an recursive identification algorithm runs at a faster timescale and updates the parameters of the local models based on the estimate of the switching signal. We first focus on piece-wise affine systems and discuss identifiability conditions and convergence properties based on the theory of two-timescale stochastic approximation. In contrast to standard identification algorithms for switched systems, the proposed approach gradually estimates the number of modes and is appropriate for real-time system identification using sequential data acquisition. The progressive nature of the algorithm improves computational efficiency and provides real-time control over the performance-complexity trade-off. Finally, we address specific challenges that arise in the application of the proposed methodology in identification of more general switching systems. Simulation results validate the efficacy of the proposed methodology.
Exploring the Effectiveness of Object-Centric Representations in Visual Question Answering: Comparative Insights with Foundation Models
Jul 22, 2024Object-centric (OC) representations, which represent the state of a visual scene by modeling it as a composition of objects, have the potential to be used in various downstream tasks to achieve systematic compositional generalization and facilitate reasoning. However, these claims have not been thoroughly analyzed yet. Recently, foundation models have demonstrated unparalleled capabilities across diverse domains from language to computer vision, marking them as a potential cornerstone of future research for a multitude of computational tasks. In this paper, we conduct an extensive empirical study on representation learning for downstream Visual Question Answering (VQA), which requires an accurate compositional understanding of the scene. We thoroughly investigate the benefits and trade-offs of OC models and alternative approaches including large pre-trained foundation models on both synthetic and real-world data, and demonstrate a viable way to achieve the best of both worlds. The extensiveness of our study, encompassing over 800 downstream VQA models and 15 different types of upstream representations, also provides several additional insights that we believe will be of interest to the community at large.