 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage Independent Named Entity Recognition via Orthogonal Transformation of Word Vectors
Mar 18, 2025



Word embeddings have been a key building block for NLP in which models relied heavily on word embeddings in many different tasks. In this paper, a model is proposed based on using Bidirectional LSTM/CRF with word embeddings to perform named entity recognition for any language. This is done by training a model on a source language (English) and transforming word embeddings from the target language into word embeddings of the source language by using an orthogonal linear transformation matrix. Evaluation of the model shows that by training a model on an English dataset the model was capable of detecting named entities in an Arabic dataset without neither training or fine tuning the model on an Arabic language dataset.
Safe Reinforcement Learning using Data-Driven Predictive Control
Nov 20, 2022Reinforcement learning (RL) algorithms can achieve state-of-the-art performance in decision-making and continuous control tasks. However, applying RL algorithms on safety-critical systems still needs to be well justified due to the exploration nature of many RL algorithms, especially when the model of the robot and the environment are unknown. To address this challenge, we propose a data-driven safety layer that acts as a filter for unsafe actions. The safety layer uses a data-driven predictive controller to enforce safety guarantees for RL policies during training and after deployment. The RL agent proposes an action that is verified by computing the data-driven reachability analysis. If there is an intersection between the reachable set of the robot using the proposed action, we call the data-driven predictive controller to find the closest safe action to the proposed unsafe action. The safety layer penalizes the RL agent if the proposed action is unsafe and replaces it with the closest safe one. In the simulation, we show that our method outperforms state-of-the-art safe RL methods on the robotics navigation problem for a Turtlebot 3 in Gazebo and a quadrotor in Unreal Engine 4 (UE4).
Amharic Abstractive Text Summarization
Mar 30, 2020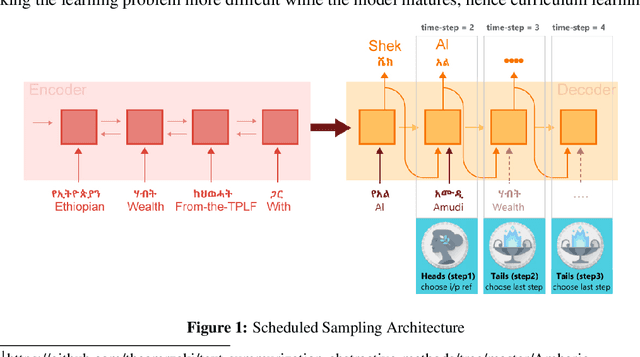
Text Summarization is the task of condensing long text into just a handful of sentences. Many approaches have been proposed for this task, some of the very first were building statistical models (Extractive Methods) capable of selecting important words and copying them to the output, however these models lacked the ability to paraphrase sentences, as they simply select important words without actually understanding their contexts nor understanding their meaning, here comes the use of Deep Learning based architectures (Abstractive Methods), which effectively tries to understand the meaning of sentences to build meaningful summaries. In this work we discuss one of these new novel approaches which combines curriculum learning with Deep Learning, this model is called Scheduled Sampling. We apply this work to one of the most widely spoken African languages which is the Amharic Language, as we try to enrich the African NLP community with top-notch Deep Learning architectures.
LiteSeg: A Novel Lightweight ConvNet for Semantic Segmentation
Dec 13, 2019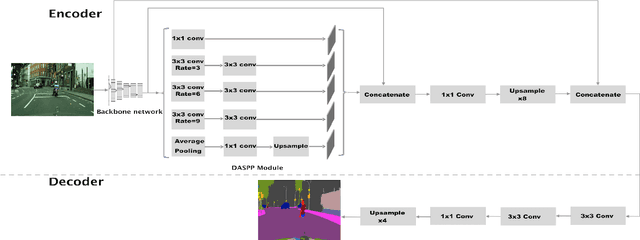

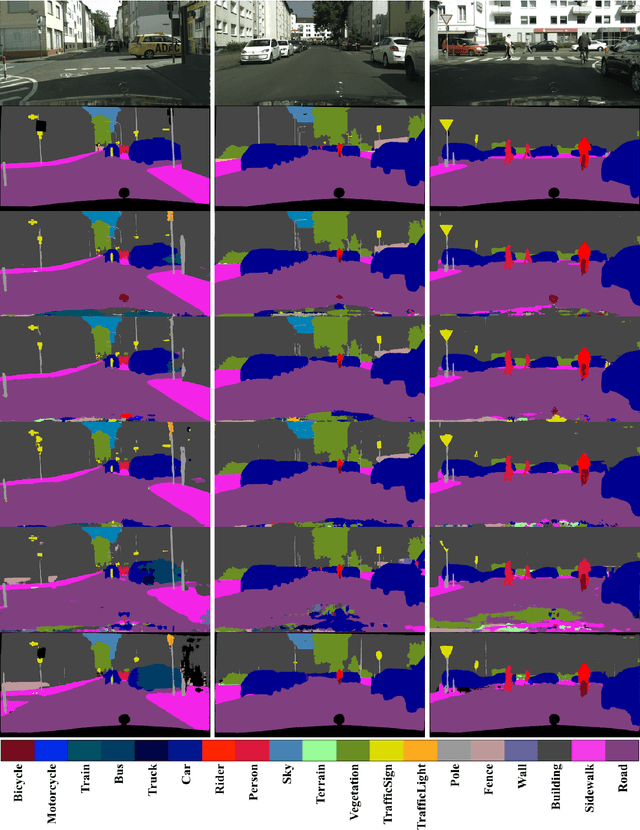

Semantic image segmentation plays a pivotal role in many vision applications including autonomous driving and medical image analysis. Most of the former approaches move towards enhancing the performance in terms of accuracy with a little awareness of computational efficiency. In this paper, we introduce LiteSeg, a lightweight architecture for semantic image segmentation. In this work, we explore a new deeper version of Atrous Spatial Pyramid Pooling module (ASPP) and apply short and long residual connections, and depthwise separable convolution, resulting in a faster and efficient model. LiteSeg architecture is introduced and tested with multiple backbone networks as Darknet19, MobileNet, and ShuffleNet to provide multiple trade-offs between accuracy and computational cost. The proposed model LiteSeg, with MobileNetV2 as a backbone network, achieves an accuracy of 67.81% mean intersection over union at 161 frames per second with $640 \times 360$ resolution on the Cityscapes dataset.