 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Line-of-Sight: Cooperative Localization Using Vision and V2X Communication
Jul 28, 2025Accurate and robust localization is critical for the safe operation of Connected and Automated Vehicles (CAVs), especially in complex urban environments where Global Navigation Satellite System (GNSS) signals are unreliable. This paper presents a novel vision-based cooperative localization algorithm that leverages onboard cameras and Vehicle-to-Everything (V2X) communication to enable CAVs to estimate their poses, even in occlusion-heavy scenarios such as busy intersections. In particular, we propose a novel decentralized observer for a group of connected agents that includes landmark agents (static or moving) in the environment with known positions and vehicle agents that need to estimate their poses (both positions and orientations). Assuming that (i) there are at least three landmark agents in the environment, (ii) each vehicle agent can measure its own angular and translational velocities as well as relative bearings to at least three neighboring landmarks or vehicles, and (iii) neighboring vehicles can communicate their pose estimates, each vehicle can estimate its own pose using the proposed decentralized observer. We prove that the origin of the estimation error is locally exponentially stable under the proposed observer, provided that the minimal observability conditions are satisfied. Moreover, we evaluate the proposed approach through experiments with real 1/10th-scale connected vehicles and large-scale simulations, demonstrating its scalability and validating the theoretical guarantees in practical scenarios.
Ensuring Safety at Intelligent Intersections: Temporal Logic Meets Reachability Analysis
May 18, 2024



In this work, we propose an approach for ensuring the safety of vehicles passing through an intelligent intersection. There are many proposals for the design of intelligent intersections that introduce central decision-makers to intersections for enhancing the efficiency and safety of the vehicles. To guarantee the safety of such designs, we develop a safety framework for intersections based on temporal logic and reachability analysis. We start by specifying the required behavior for all the vehicles that need to pass through the intersection as linear temporal logic formula. Then, using temporal logic trees, we break down the linear temporal logic specification into a series of Hamilton-Jacobi reachability analyses in an automated fashion. By successfully constructing the temporal logic tree through reachability analysis, we verify the feasibility of the intersection specification. By taking this approach, we enable a safety framework that is able to automatically provide safety guarantees on new intersection behavior specifications. To evaluate our approach, we implement the framework on a simulated T-intersection, where we show that we can check and guarantee the safety of vehicles with potentially conflicting paths.
Guaranteed Completion of Complex Tasks via Temporal Logic Trees and Hamilton-Jacobi Reachability
Apr 12, 2024In this paper, we present an approach for guaranteeing the completion of complex tasks with cyber-physical systems (CPS). Specifically, we leverage temporal logic trees constructed using Hamilton-Jacobi reachability analysis to (1) check for the existence of control policies that complete a specified task and (2) develop a computationally-efficient approach to synthesize the full set of control inputs the CPS can implement in real-time to ensure the task is completed. We show that, by checking the approximation directions of each state set in the temporal logic tree, we can check if the temporal logic tree suffers from the "leaking corner issue," where the intersection of reachable sets yields an incorrect approximation. By ensuring a temporal logic tree has no leaking corners, we know the temporal logic tree correctly verifies the existence of control policies that satisfy the specified task. After confirming the existence of control policies, we show that we can leverage the value functions obtained through Hamilton-Jacobi reachability analysis to efficiently compute the set of control inputs the CPS can implement throughout the deployment time horizon to guarantee the completion of the specified task. Finally, we use a newly released Python toolbox to evaluate the presented approach on a simulated driving task.
Enhancing Data-Driven Reachability Analysis using Temporal Logic Side Information
Sep 15, 2021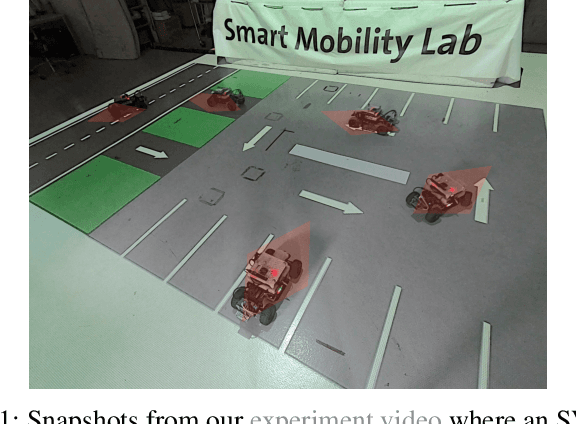

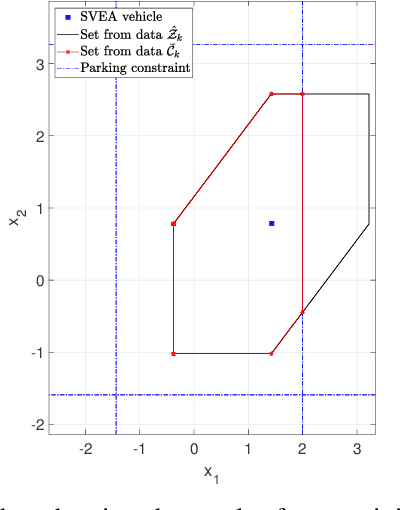
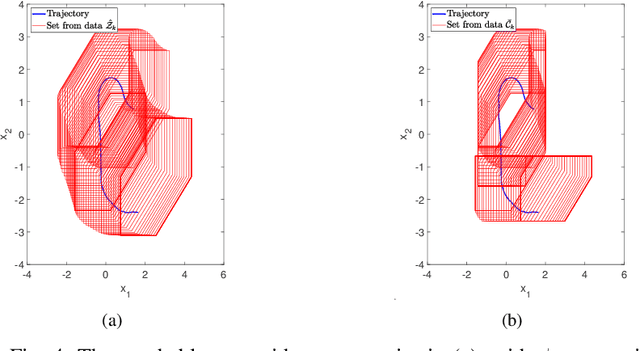
This paper presents algorithms for performing data-driven reachability analysis under temporal logic side information. In certain scenarios, the data-driven reachable sets of a robot can be prohibitively conservative due to the inherent noise in the robot's historical measurement data. In the same scenarios, we often have side information about the robot's expected motion (e.g., limits on how much a robot can move in a one-time step) that could be useful for further specifying the reachability analysis. In this work, we show that if we can model this side information using a signal temporal logic (STL) fragment, we can constrain the data-driven reachability analysis and safely limit the conservatism of the computed reachable sets. Moreover, we provide formal guarantees that, even after incorporating side information, the computed reachable sets still properly over-approximate the robot's future states. Lastly, we empirically validate the practicality of the over-approximation by computing constrained, data-driven reachable sets for the Small-Vehicles-for-Autonomy (SVEA) hardware platform in two driving scenarios.
Learning Quadrotor Dynamics Using Neural Network for Flight Control
Oct 19, 2016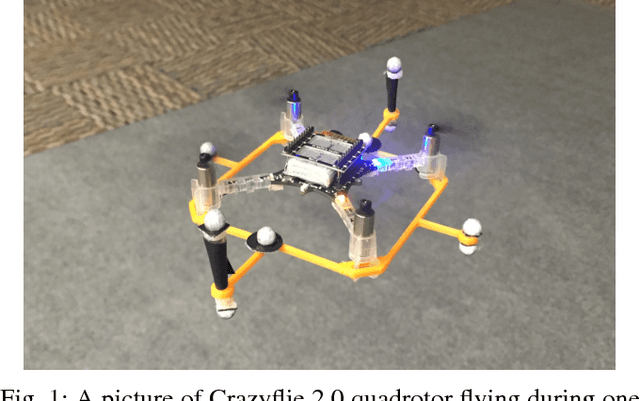
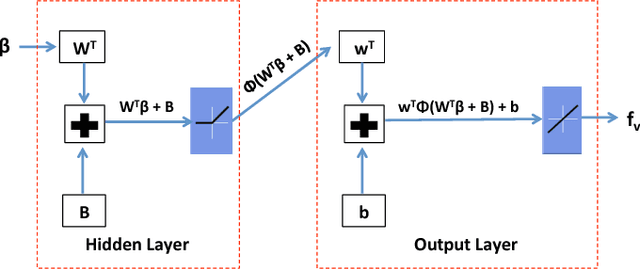
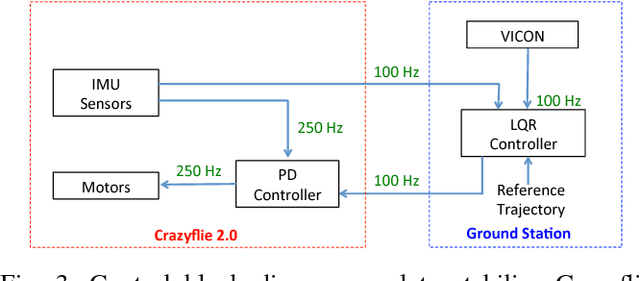
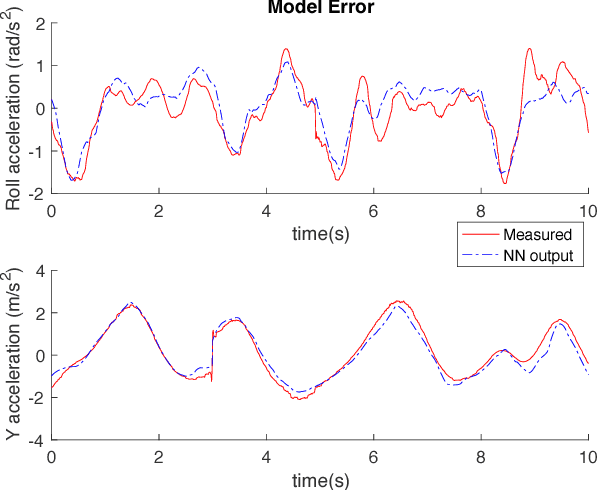
Traditional learning approaches proposed for controlling quadrotors or helicopters have focused on improving performance for specific trajectories by iteratively improving upon a nominal controller, for example learning from demonstrations, iterative learning, and reinforcement learning. In these schemes, however, it is not clear how the information gathered from the training trajectories can be used to synthesize controllers for more general trajectories. Recently, the efficacy of deep learning in inferring helicopter dynamics has been shown. Motivated by the generalization capability of deep learning, this paper investigates whether a neural network based dynamics model can be employed to synthesize control for trajectories different than those used for training. To test this, we learn a quadrotor dynamics model using only translational and only rotational training trajectories, each of which can be controlled independently, and then use it to simultaneously control the yaw and position of a quadrotor, which is non-trivial because of nonlinear couplings between the two motions. We validate our approach in experiments on a quadrotor testbed.