 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Line-of-Sight: Cooperative Localization Using Vision and V2X Communication
Jul 28, 2025Accurate and robust localization is critical for the safe operation of Connected and Automated Vehicles (CAVs), especially in complex urban environments where Global Navigation Satellite System (GNSS) signals are unreliable. This paper presents a novel vision-based cooperative localization algorithm that leverages onboard cameras and Vehicle-to-Everything (V2X) communication to enable CAVs to estimate their poses, even in occlusion-heavy scenarios such as busy intersections. In particular, we propose a novel decentralized observer for a group of connected agents that includes landmark agents (static or moving) in the environment with known positions and vehicle agents that need to estimate their poses (both positions and orientations). Assuming that (i) there are at least three landmark agents in the environment, (ii) each vehicle agent can measure its own angular and translational velocities as well as relative bearings to at least three neighboring landmarks or vehicles, and (iii) neighboring vehicles can communicate their pose estimates, each vehicle can estimate its own pose using the proposed decentralized observer. We prove that the origin of the estimation error is locally exponentially stable under the proposed observer, provided that the minimal observability conditions are satisfied. Moreover, we evaluate the proposed approach through experiments with real 1/10th-scale connected vehicles and large-scale simulations, demonstrating its scalability and validating the theoretical guarantees in practical scenarios.
Leveraging Sidewalk Robots for Walkability-Related Analyses
Jul 16, 2025Walkability is a key component of sustainable urban development, while collecting detailed data on its related features remains challenging due to the high costs and limited scalability of traditional methods. Sidewalk delivery robots, increasingly deployed in urban environments, offer a promising solution to these limitations. This paper explores how these robots can serve as mobile data collection platforms, capturing sidewalk-level features related to walkability in a scalable, automated, and real-time manner. A sensor-equipped robot was deployed on a sidewalk network at KTH in Stockholm, completing 101 trips covering 900 segments. From the collected data, different typologies of features are derived, including robot trip characteristics (e.g., speed, duration), sidewalk conditions (e.g., width, surface unevenness), and sidewalk utilization (e.g., pedestrian density). Their walkability-related implications were investigated with a series of analyses. The results demonstrate that pedestrian movement patterns are strongly influenced by sidewalk characteristics, with higher density, reduced width, and surface irregularity associated with slower and more variable trajectories. Notably, robot speed closely mirrors pedestrian behavior, highlighting its potential as a proxy for assessing pedestrian dynamics. The proposed framework enables continuous monitoring of sidewalk conditions and pedestrian behavior, contributing to the development of more walkable, inclusive, and responsive urban environments.
Ensuring Safety at Intelligent Intersections: Temporal Logic Meets Reachability Analysis
May 18, 2024



In this work, we propose an approach for ensuring the safety of vehicles passing through an intelligent intersection. There are many proposals for the design of intelligent intersections that introduce central decision-makers to intersections for enhancing the efficiency and safety of the vehicles. To guarantee the safety of such designs, we develop a safety framework for intersections based on temporal logic and reachability analysis. We start by specifying the required behavior for all the vehicles that need to pass through the intersection as linear temporal logic formula. Then, using temporal logic trees, we break down the linear temporal logic specification into a series of Hamilton-Jacobi reachability analyses in an automated fashion. By successfully constructing the temporal logic tree through reachability analysis, we verify the feasibility of the intersection specification. By taking this approach, we enable a safety framework that is able to automatically provide safety guarantees on new intersection behavior specifications. To evaluate our approach, we implement the framework on a simulated T-intersection, where we show that we can check and guarantee the safety of vehicles with potentially conflicting paths.
Shared Situational Awareness with V2X Communication and Set-membership Estimation
Feb 10, 2023



The ability to perceive and comprehend a traffic situation and to predict the intent of vehicles and road-users in the surrounding of the ego-vehicle is known as situational awareness. Situational awareness for a heavy-duty autonomous vehicle is a critical part of the automation platform and is dependent on the ego-vehicle's field-of-view. But when it comes to the urban scenario, the field-of-view of the ego-vehicle is likely to be affected by occlusion and blind spots caused by infrastructure, moving vehicles, and parked vehicles. This paper proposes a framework to improve situational awareness using set-membership estimation and vehicle-to-everything (V2X) communication. This framework provides safety guarantees and can adapt to dynamically changing scenarios, and is integrated into an existing complex autonomous platform. A detailed description of the framework implementation and real-time results are illustrated in this paper.
Multiagent Rollout with Reshuffling for Warehouse Robots Path Planning
Nov 15, 2022Efficiently solving path planning problems for a large number of robots is critical to the successful operation of modern warehouses. The existing approaches adopt classical shortest path algorithms to plan in environments whose cells are associated with both space and time in order to avoid collision between robots. In this work, we achieve the same goal by means of simulation in a smaller static environment. Built upon the new framework introduced in (Bertsekas, 2021a), we propose multiagent rollout with reshuffling algorithm, and apply it to address the warehouse robots path planning problem. The proposed scheme has a solid theoretical guarantee and exhibits consistent performance in our numerical studies. Moreover, it inherits from the generic rollout methods the ability to adapt to a changing environment by online replanning, which we demonstrate through examples where some robots malfunction.
Multi-criteria Decision-making of Intelligent Vehicles under Fault Condition Enhancing Public-private Partnership
May 27, 2022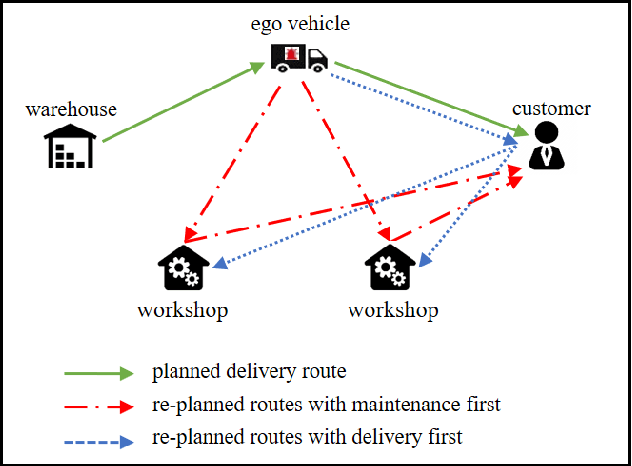
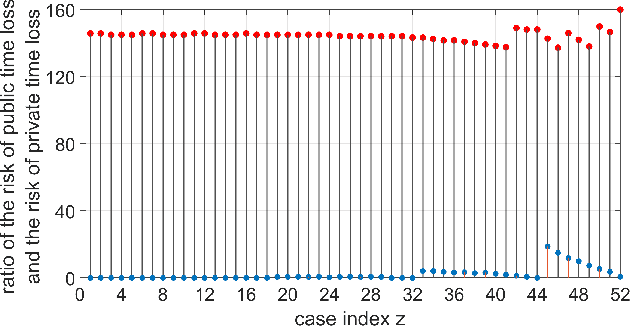
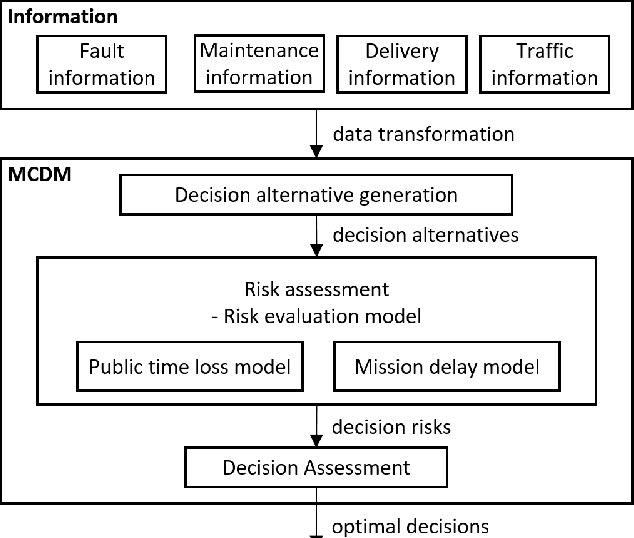
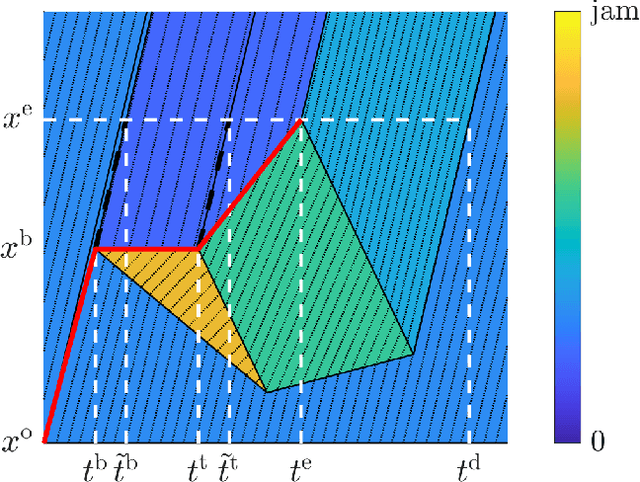
With the development of vehicular technologies on automation, electrification, and digitalization, vehicles are becoming more intelligent while being exposed to more complex, uncertain, and frequently occurring faults. In this paper, we look into the maintenance planning of an operating vehicle under fault condition and formulate it as a multi-criteria decision-making problem. The maintenance decisions are generated by route searching in road networks and evaluated based on risk assessment considering the uncertainty of vehicle breakdowns. Particularly, we consider two criteria, namely the risk of public time loss and the risk of mission delay, representing the concerns of the public sector and the private sector, respectively. A public time loss model is developed to evaluate the traffic congestion caused by a vehicle breakdown and the corresponding towing process. The Pareto optimal set of non-dominated decisions is derived by evaluating the risk of the decisions. We demonstrate the relevance of the problem and the effectiveness of the proposed method by numerical experiments derived from real-world scenarios. The experiments show that neglecting the risk of vehicle breakdown on public roads can cause a high risk of public time loss in dense traffic flow. With the proposed method, alternate decisions can be derived to reduce the risks of public time loss significantly with a low increase in the risk of mission delay. This study aims at catalyzing public-private partnership through collaborative decision-making between the private sector and the public sector, thus archiving a more sustainable transportation system in the future.
Short-term Maintenance Planning of Autonomous Trucks for Minimizing Economic Risk
May 28, 2021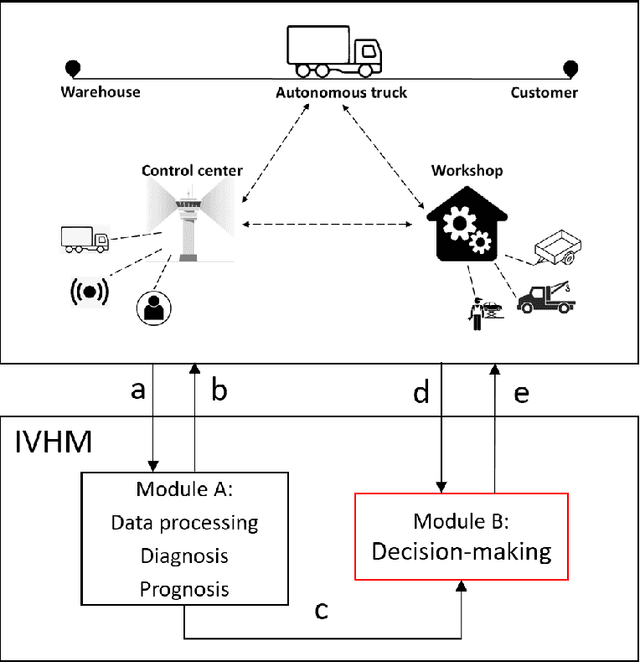
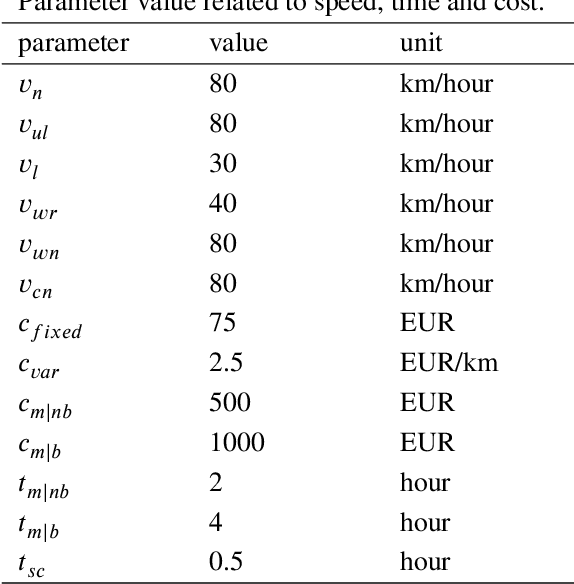
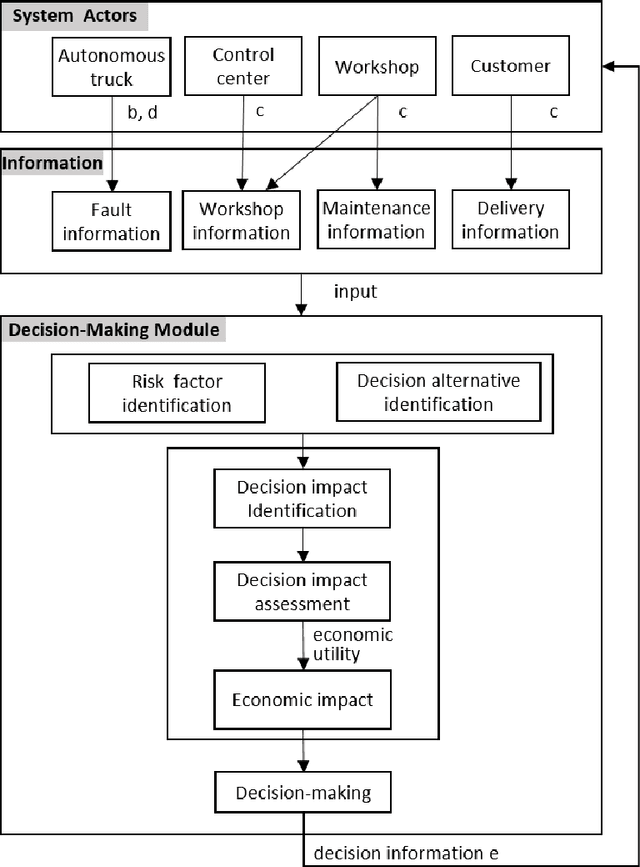
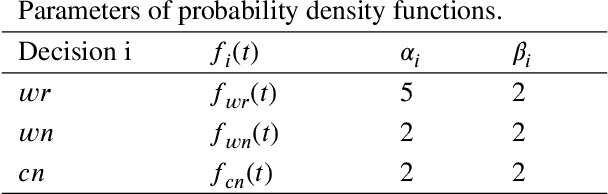
New autonomous driving technologies are emerging every day and some of them have been commercially applied in the real world. While benefiting from these technologies, autonomous trucks are facing new challenges in short-term maintenance planning, which directly influences the truck operator's profit. In this paper, we implement a vehicle health management system by addressing the maintenance planning issues of autonomous trucks on a transport mission. We also present a maintenance planning model using a risk-based decision-making method, which identifies the maintenance decision with minimal economic risk of the truck company. Both availability losses and maintenance costs are considered when evaluating the economic risk. We demonstrate the proposed model by numerical experiments illustrating real-world scenarios. In the experiments, compared to three baseline methods, the expected economic risk of the proposed method is reduced by up to $47\%$. We also conduct sensitivity analyses of different model parameters. The analyses show that the economic risk significantly decreases when the estimation accuracy of remaining useful life, the maximal allowed time of delivery delay before order cancellation, or the number of workshops increases. The experiment results contribute to identifying future research and development attentions of autonomous trucks from an economic perspective.
Set-Membership Estimation in Shared Situational Awareness for Automated Vehicles in Occluded Scenarios
Mar 02, 2021
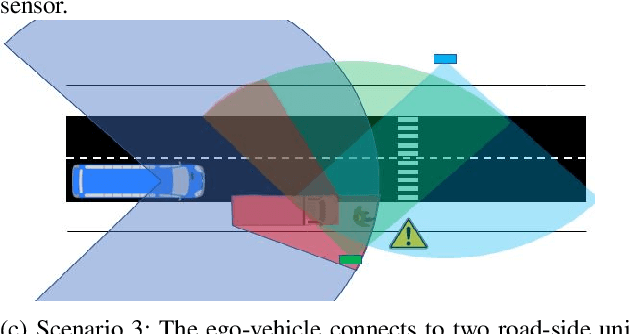
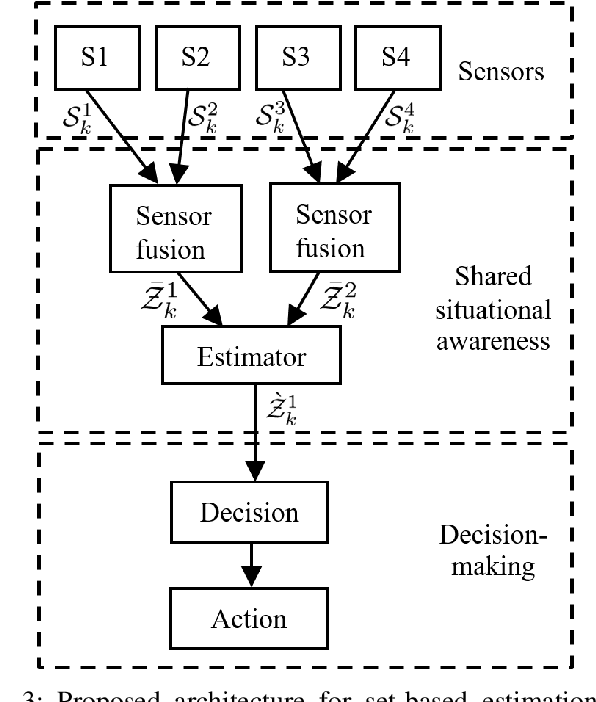
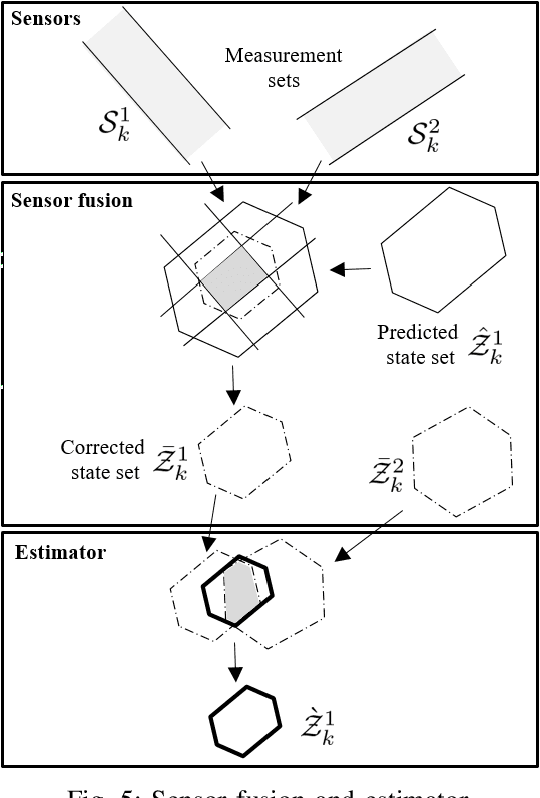
One of the main challenges in developing autonomous transport systems based on connected and automated vehicles is the comprehension and understanding of the environment around each vehicle. In many situations, the understanding is limited to the information gathered by the sensors mounted on the ego-vehicle, and it might be severely affected by occlusion caused by other vehicles or fixed obstacles along the road. Situational awareness is the ability to perceive and comprehend a traffic situation and to predict the intent of vehicles and road users in the surrounding of the ego-vehicle. The main objective of this paper is to propose a framework for how to automatically increase the situational awareness for an automatic bus in a realistic scenario when a pedestrian behind a parked truck might decide to walk across the road. Depending on the ego-vehicle's ability to fuse information from sensors in other vehicles or in the infrastructure, shared situational awareness is developed using a set-based estimation technique that provides robust guarantees for the location of the pedestrian. A two-level information fusion architecture is adopted, where sensor measurements are fused locally, and then the corresponding estimates are shared between vehicles and units in the infrastructure. Thanks to the provided safety guarantees, it is possible to appropriately adjust the ego-vehicle speed to maintain a proper safety margin. It is also argued that the framework is suitable for handling sensor failures and false detections in a systematic way. Three scenarios of growing information complexity are considered throughout the study. Simulations show how the increased situational awareness allows the ego-vehicle to maintain a reasonable speed without sacrificing safety.
A Geometric Approach to On-road Motion Planning for Long and Multi-Body Heavy-Duty Vehicles
Oct 15, 2020
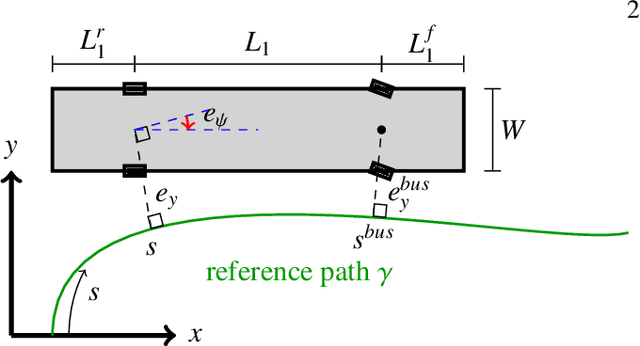
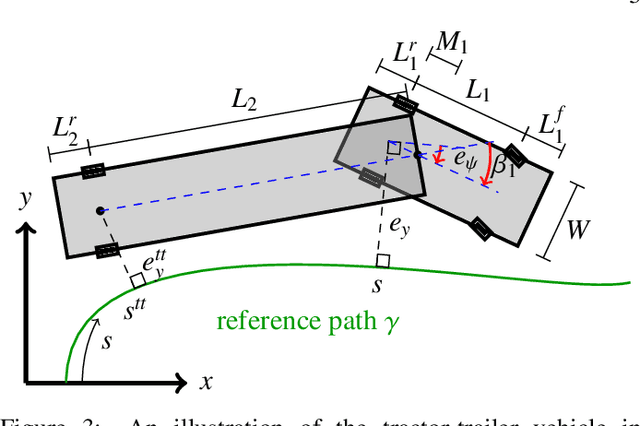
Driving heavy-duty vehicles, such as buses and tractor-trailer vehicles, is a difficult task in comparison to passenger cars. Most research on motion planning for autonomous vehicles has focused on passenger vehicles, and many unique challenges associated with heavy-duty vehicles remain open. However, recent works have started to tackle the particular difficulties related to on-road motion planning for buses and tractor-trailer vehicles using numerical optimization approaches. In this work, we propose a framework to design an optimization objective to be used in motion planners. Based on geometric derivations, the method finds the optimal trade-off between the conflicting objectives of centering different axles of the vehicle in the lane. For the buses, we consider the front and rear axles trade-off, whereas for articulated vehicles, we consider the tractor and trailer rear axles trade-off. Our results show that the proposed design strategy results in planned paths that considerably improve the behavior of heavy-duty vehicles by keeping the whole vehicle body in the center of the lane.
Path Planning for Autonomous Bus Driving in Urban Environments
May 05, 2019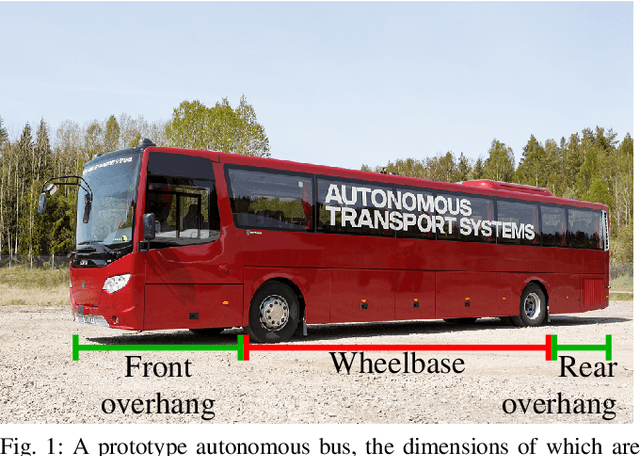
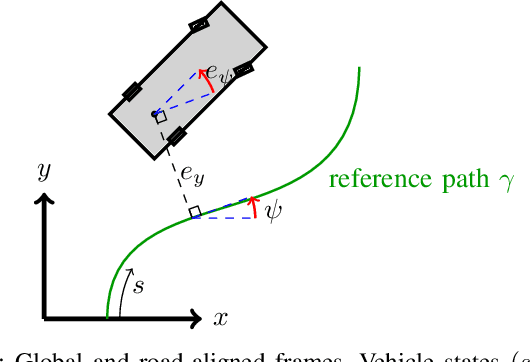

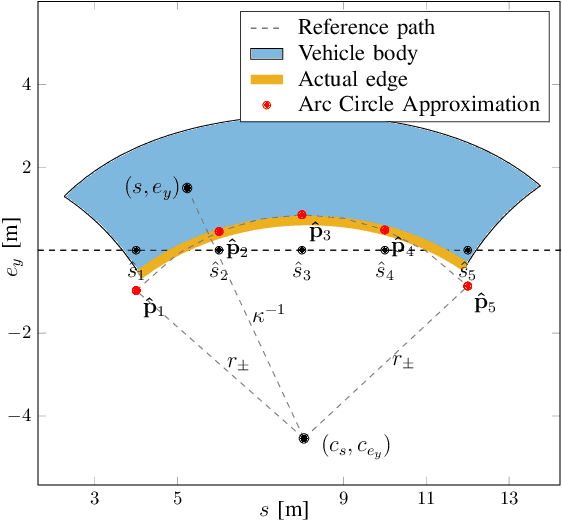
Driving in urban environments often presents difficult situations that require expert maneuvering of a vehicle. These situations become even more challenging when considering large vehicles, such as buses. We present a path planning framework that addresses the demanding driving task of buses in urban areas. The approach is formulated as an optimization problem using the road-aligned vehicle model. The road-aligned frame introduces a distortion on the vehicle body and obstacles, motivating the development of novel approximations that capture this distortion. These approximations allow for the formulation of safe and non-conservative collision avoidance constraints. Unlike other path planning approaches, our method exploits curbs and other sweepable regions, which a bus must often sweep over in order to manage certain maneuvers. Furthermore, it takes full advantage of the particular characteristics of buses, namely the overhangs, an elevated part of the vehicle chassis, that can sweep over curbs. Simulations are presented, showing the applicability and benefits of the proposed method.