 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-criteria Decision-making of Intelligent Vehicles under Fault Condition Enhancing Public-private Partnership
Paper and Code
May 27, 2022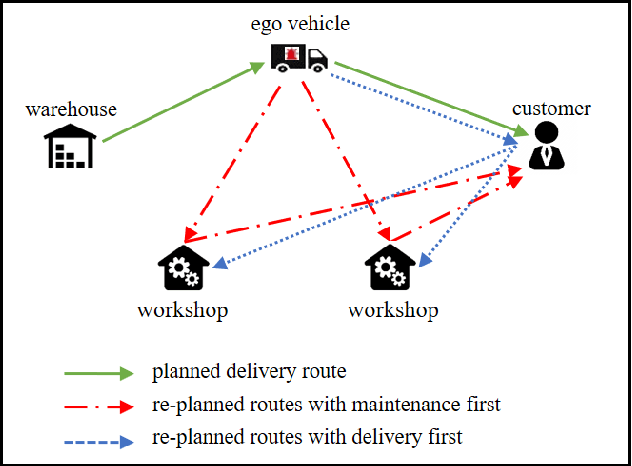
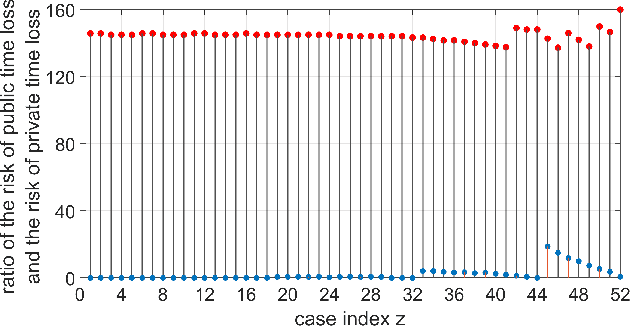
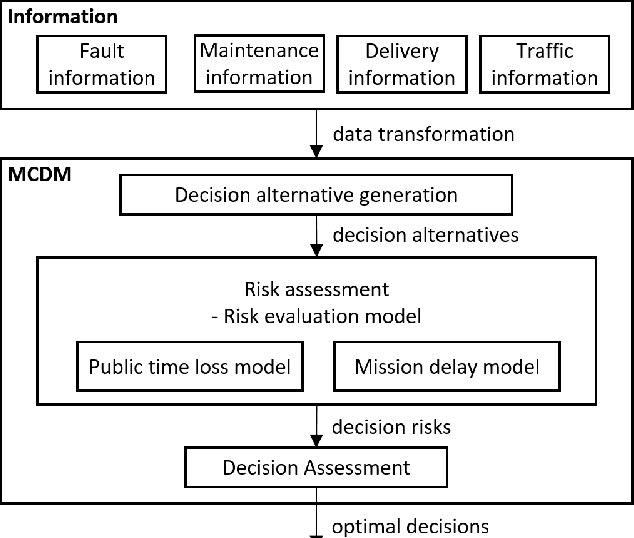
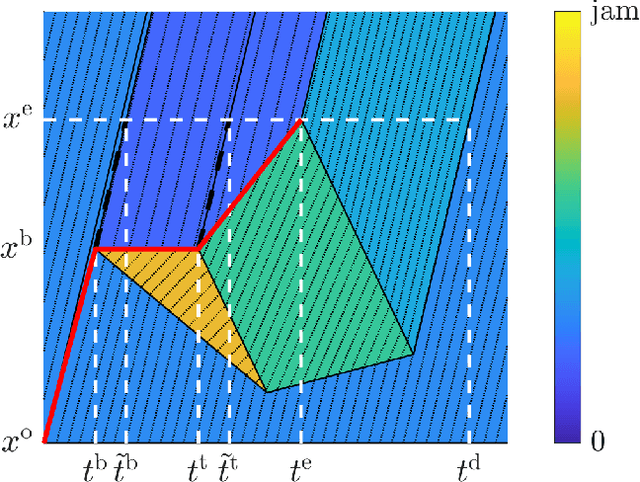
With the development of vehicular technologies on automation, electrification, and digitalization, vehicles are becoming more intelligent while being exposed to more complex, uncertain, and frequently occurring faults. In this paper, we look into the maintenance planning of an operating vehicle under fault condition and formulate it as a multi-criteria decision-making problem. The maintenance decisions are generated by route searching in road networks and evaluated based on risk assessment considering the uncertainty of vehicle breakdowns. Particularly, we consider two criteria, namely the risk of public time loss and the risk of mission delay, representing the concerns of the public sector and the private sector, respectively. A public time loss model is developed to evaluate the traffic congestion caused by a vehicle breakdown and the corresponding towing process. The Pareto optimal set of non-dominated decisions is derived by evaluating the risk of the decisions. We demonstrate the relevance of the problem and the effectiveness of the proposed method by numerical experiments derived from real-world scenarios. The experiments show that neglecting the risk of vehicle breakdown on public roads can cause a high risk of public time loss in dense traffic flow. With the proposed method, alternate decisions can be derived to reduce the risks of public time loss significantly with a low increase in the risk of mission delay. This study aims at catalyzing public-private partnership through collaborative decision-making between the private sector and the public sector, thus archiving a more sustainable transportation system in the future.