 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Geometric Approach to On-road Motion Planning for Long and Multi-Body Heavy-Duty Vehicles
Oct 15, 2020
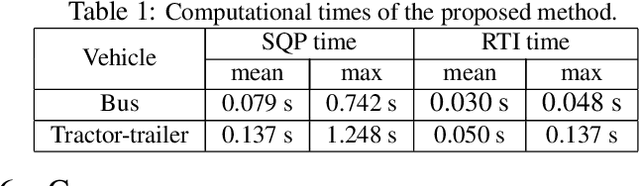
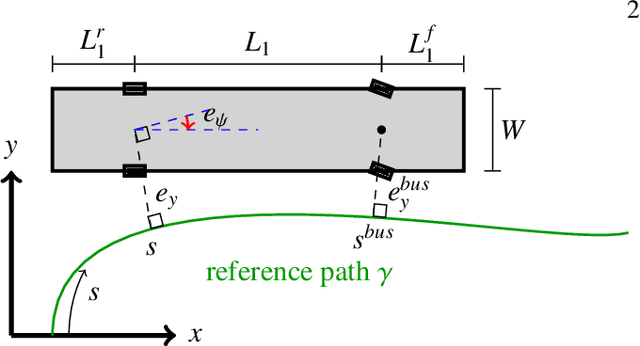
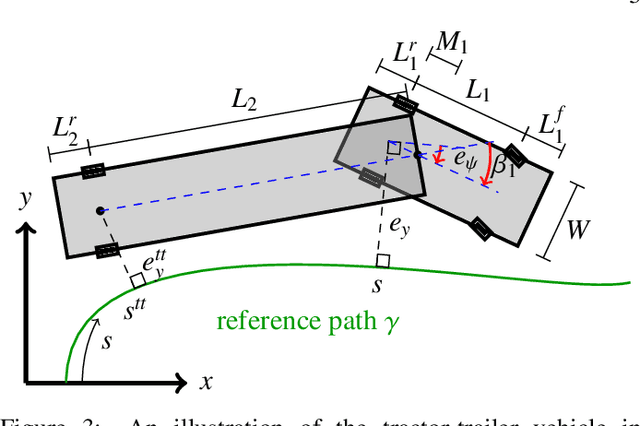
Driving heavy-duty vehicles, such as buses and tractor-trailer vehicles, is a difficult task in comparison to passenger cars. Most research on motion planning for autonomous vehicles has focused on passenger vehicles, and many unique challenges associated with heavy-duty vehicles remain open. However, recent works have started to tackle the particular difficulties related to on-road motion planning for buses and tractor-trailer vehicles using numerical optimization approaches. In this work, we propose a framework to design an optimization objective to be used in motion planners. Based on geometric derivations, the method finds the optimal trade-off between the conflicting objectives of centering different axles of the vehicle in the lane. For the buses, we consider the front and rear axles trade-off, whereas for articulated vehicles, we consider the tractor and trailer rear axles trade-off. Our results show that the proposed design strategy results in planned paths that considerably improve the behavior of heavy-duty vehicles by keeping the whole vehicle body in the center of the lane.
Optimization-Based On-Road Path Planning for Articulated Vehicles
Jan 19, 2020
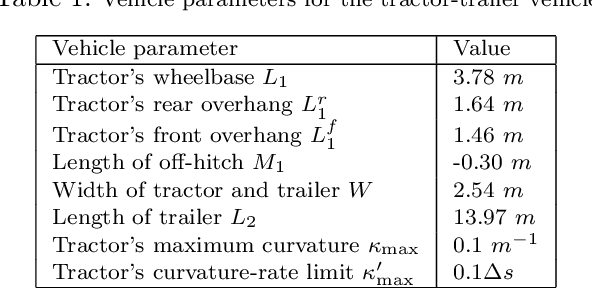


Maneuvering an articulated vehicle on narrow road stretches is often a challenging task for a human driver. Unless the vehicle is accurately steered, parts of the vehicle's bodies may exceed its assigned drive lane, resulting in an increased risk of collision with surrounding traffic. In this work, an optimization-based path-planning algorithm is proposed targeting on-road driving scenarios for articulated vehicles composed of a tractor and a trailer. To this end, we model the tractor-trailer vehicle in a road-aligned coordinate frame suited for on-road planning. Based on driving heuristics, a set of different optimization objectives is proposed, with the overall goal of designing a path planner that computes paths which minimize the off-track of the vehicle bodies swept area, while remaining on the road and avoiding collision with obstacles. The proposed optimization-based path-planning algorithm, together with the different optimization objectives, is evaluated and analyzed in simulations on a set of complicated and practically relevant on-road planning scenarios using the most challenging tractor-trailer dimensions.
Path Planning for Autonomous Bus Driving in Urban Environments
May 05, 2019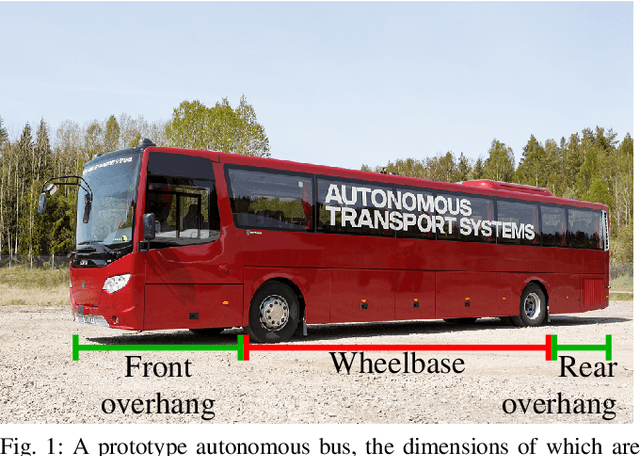
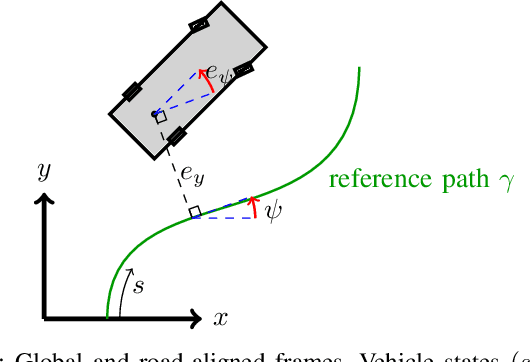

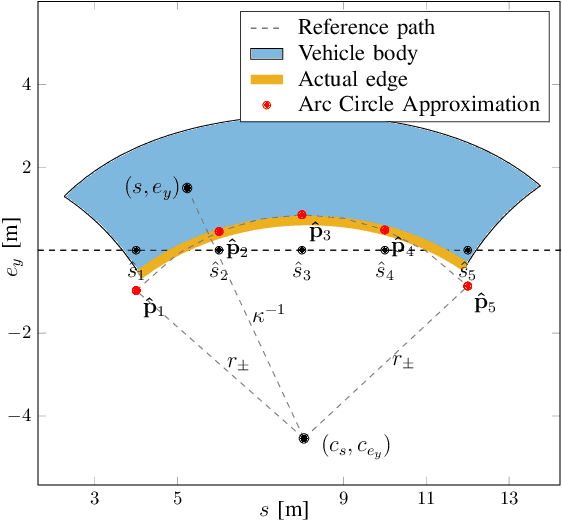
Driving in urban environments often presents difficult situations that require expert maneuvering of a vehicle. These situations become even more challenging when considering large vehicles, such as buses. We present a path planning framework that addresses the demanding driving task of buses in urban areas. The approach is formulated as an optimization problem using the road-aligned vehicle model. The road-aligned frame introduces a distortion on the vehicle body and obstacles, motivating the development of novel approximations that capture this distortion. These approximations allow for the formulation of safe and non-conservative collision avoidance constraints. Unlike other path planning approaches, our method exploits curbs and other sweepable regions, which a bus must often sweep over in order to manage certain maneuvers. Furthermore, it takes full advantage of the particular characteristics of buses, namely the overhangs, an elevated part of the vehicle chassis, that can sweep over curbs. Simulations are presented, showing the applicability and benefits of the proposed method.
Trajectory Generation using Sharpness Continuous Dubins-like Paths with Applications in Control of Heavy Duty Vehicles
May 07, 2018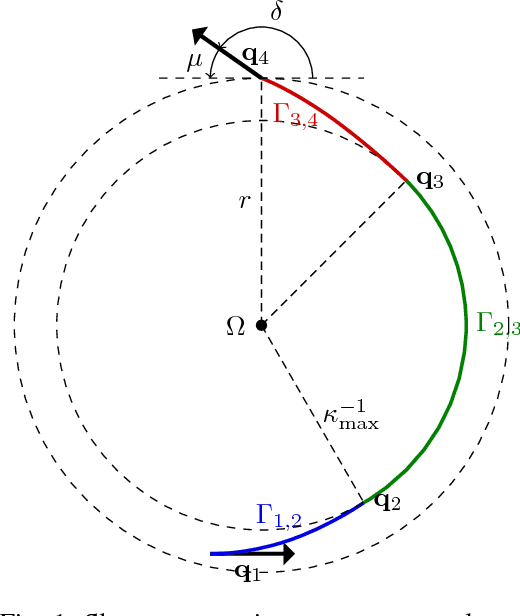
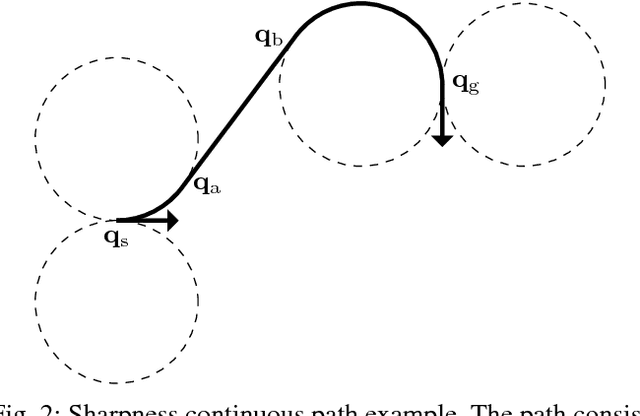
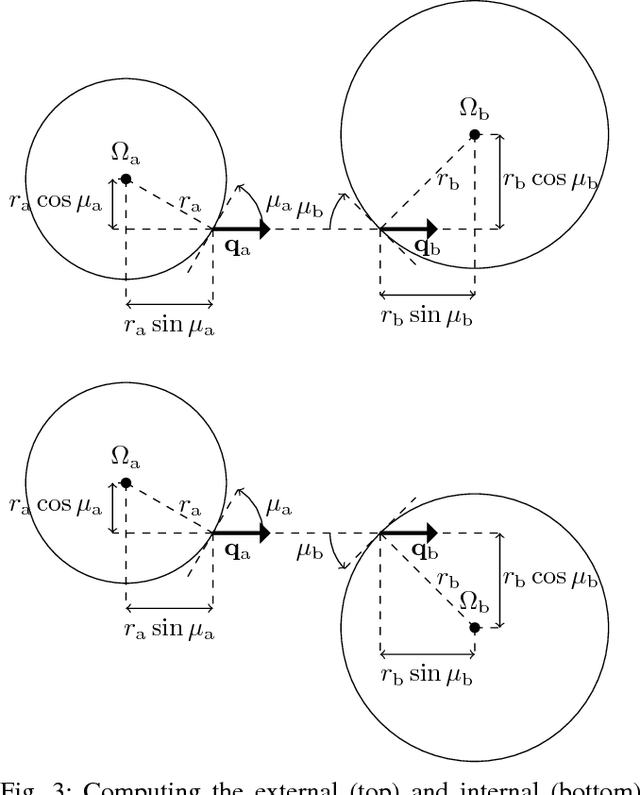
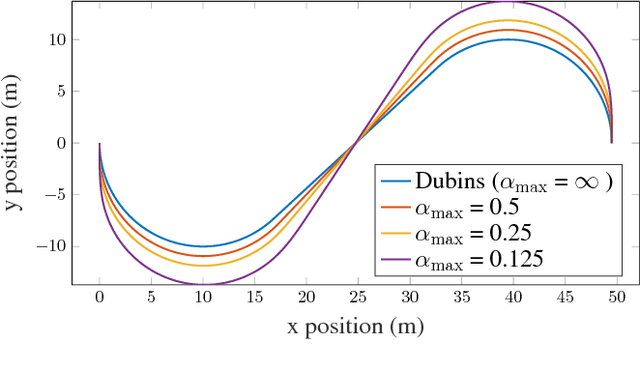
We present a trajectory generation framework for control of wheeled vehicles under steering actuator constraints. The motivation is smooth autonomous driving of heavy vehicles. The key idea is to take into account rate, and additionally, torque limitations of the steering actuator directly. Previous methods only take into account curvature rate limitations, which deal indirectly with steering rate limitations. We propose the new concept of Sharpness Continuous curves, which uses cubic and sigmoid curvature trajectories together with circular arcs to steer the vehicle. The obtained trajectories are characterized by a smooth and continuously differentiable steering angle profile. These trajectories provide low-level controllers with reference signals which are easier to track, resulting in improved performance. The smoothness of the obtained steering profiles also results in increased passenger comfort. The method is characterized by a fast computation time, which can be further speeded up through the use of simple pre-computations. We detail possible path planning applications of the method, and conduct simulations that show its advantages and real time capabilities.