 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization-Based On-Road Path Planning for Articulated Vehicles
Paper and Code
Jan 19, 2020
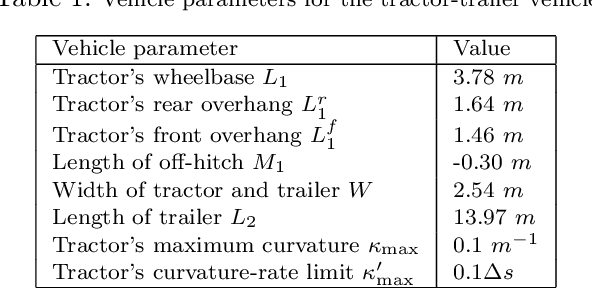


Maneuvering an articulated vehicle on narrow road stretches is often a challenging task for a human driver. Unless the vehicle is accurately steered, parts of the vehicle's bodies may exceed its assigned drive lane, resulting in an increased risk of collision with surrounding traffic. In this work, an optimization-based path-planning algorithm is proposed targeting on-road driving scenarios for articulated vehicles composed of a tractor and a trailer. To this end, we model the tractor-trailer vehicle in a road-aligned coordinate frame suited for on-road planning. Based on driving heuristics, a set of different optimization objectives is proposed, with the overall goal of designing a path planner that computes paths which minimize the off-track of the vehicle bodies swept area, while remaining on the road and avoiding collision with obstacles. The proposed optimization-based path-planning algorithm, together with the different optimization objectives, is evaluated and analyzed in simulations on a set of complicated and practically relevant on-road planning scenarios using the most challenging tractor-trailer dimensions.