 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA path planning and path-following control framework for a general 2-trailer with a car-like tractor
Apr 02, 2019
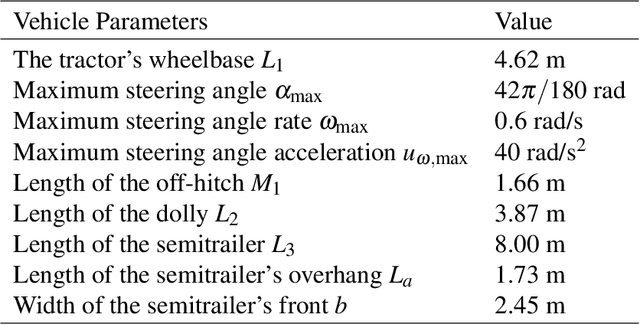
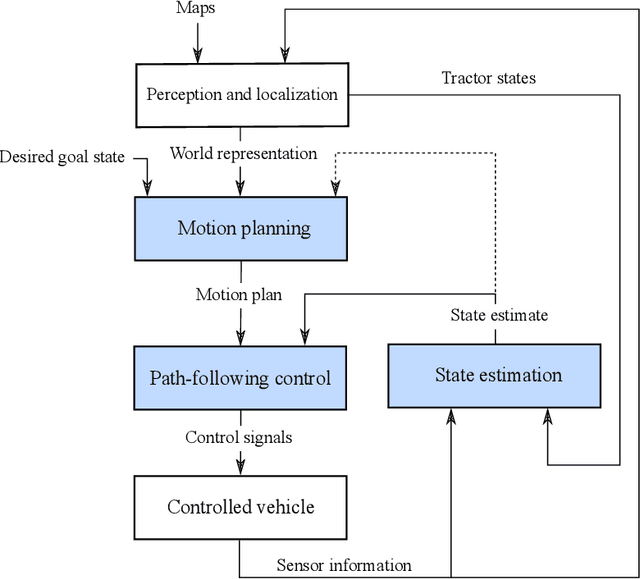
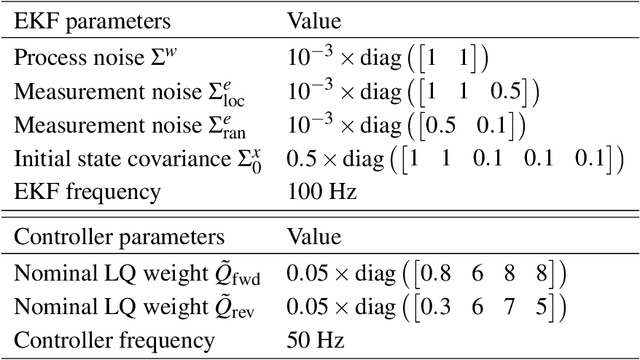
Maneuvering a general 2-trailer with a car-like tractor in backward motion is a task that requires significant skill to master and is unarguably one of the most complicated tasks a truck driver has to perform. This paper presents a path planning and path-following control solution that can be used to automatically plan and execute difficult parking and obstacle avoidance maneuvers by combining backward and forward motion. A lattice-based path planning framework is developed in order to generate kinematically feasible and collision-free paths and a path-following controller is designed to stabilize the lateral and angular path-following error states during path execution. To estimate the vehicle states needed for control, a nonlinear observer is developed which only utilizes information from sensors that are mounted on the car-like tractor, making the system independent of additional trailer sensors. The proposed path planning and path-following control framework is implemented on a full-scale test vehicle and results from simulations and real-world experiments are presented.
Trajectory Generation using Sharpness Continuous Dubins-like Paths with Applications in Control of Heavy Duty Vehicles
May 07, 2018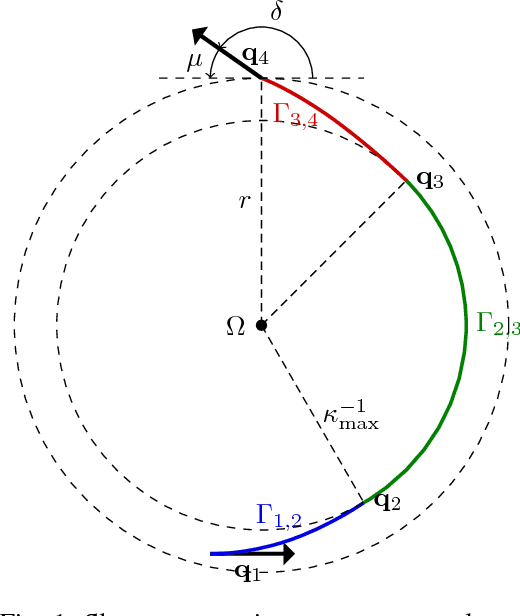
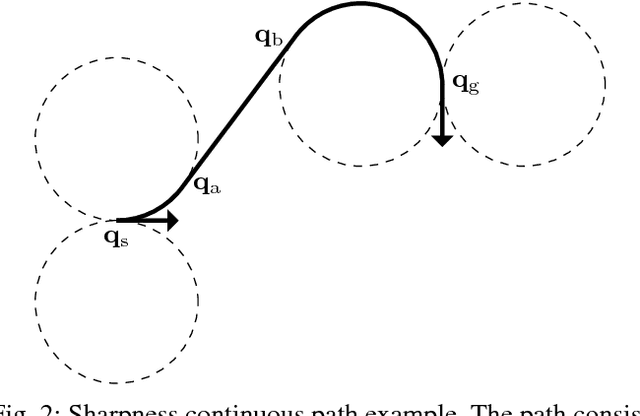
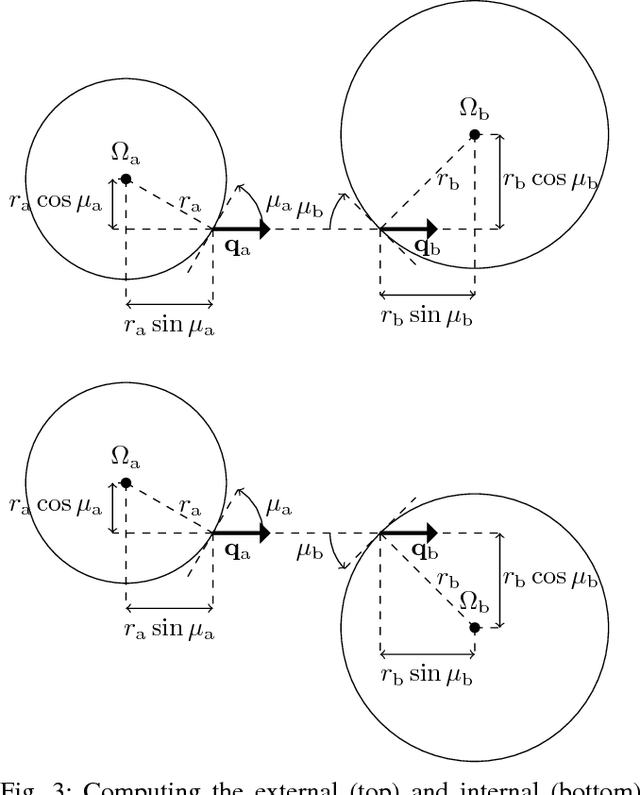
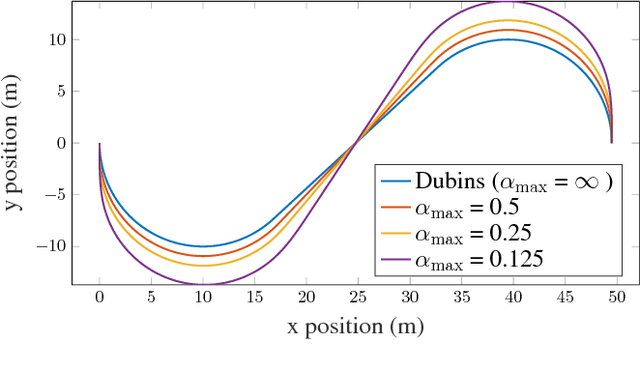
We present a trajectory generation framework for control of wheeled vehicles under steering actuator constraints. The motivation is smooth autonomous driving of heavy vehicles. The key idea is to take into account rate, and additionally, torque limitations of the steering actuator directly. Previous methods only take into account curvature rate limitations, which deal indirectly with steering rate limitations. We propose the new concept of Sharpness Continuous curves, which uses cubic and sigmoid curvature trajectories together with circular arcs to steer the vehicle. The obtained trajectories are characterized by a smooth and continuously differentiable steering angle profile. These trajectories provide low-level controllers with reference signals which are easier to track, resulting in improved performance. The smoothness of the obtained steering profiles also results in increased passenger comfort. The method is characterized by a fast computation time, which can be further speeded up through the use of simple pre-computations. We detail possible path planning applications of the method, and conduct simulations that show its advantages and real time capabilities.