 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA path planning and path-following control framework for a general 2-trailer with a car-like tractor
Paper and Code
Apr 02, 2019
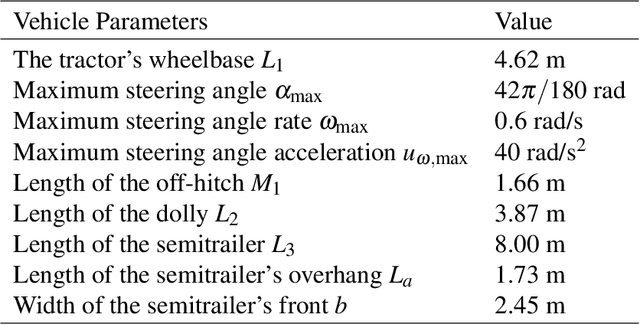
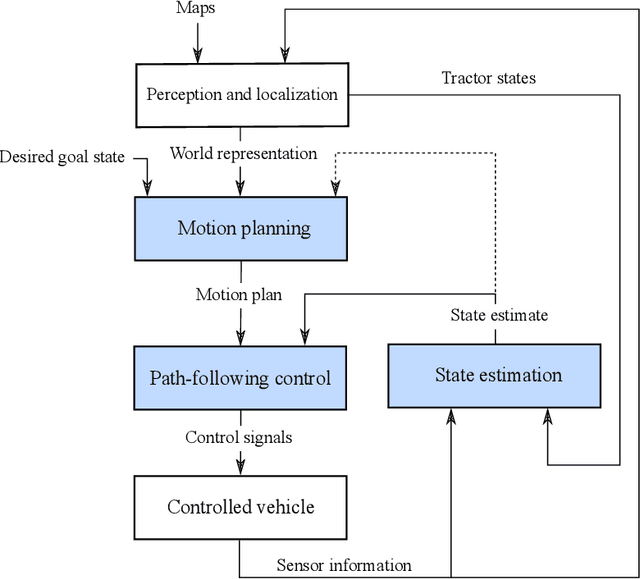
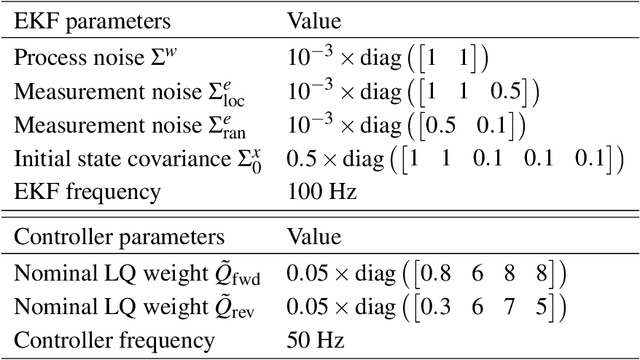
Maneuvering a general 2-trailer with a car-like tractor in backward motion is a task that requires significant skill to master and is unarguably one of the most complicated tasks a truck driver has to perform. This paper presents a path planning and path-following control solution that can be used to automatically plan and execute difficult parking and obstacle avoidance maneuvers by combining backward and forward motion. A lattice-based path planning framework is developed in order to generate kinematically feasible and collision-free paths and a path-following controller is designed to stabilize the lateral and angular path-following error states during path execution. To estimate the vehicle states needed for control, a nonlinear observer is developed which only utilizes information from sensors that are mounted on the car-like tractor, making the system independent of additional trailer sensors. The proposed path planning and path-following control framework is implemented on a full-scale test vehicle and results from simulations and real-world experiments are presented.