 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended target tracking utilizing machine-learning software -- with applications to animal classification
Oct 12, 2023
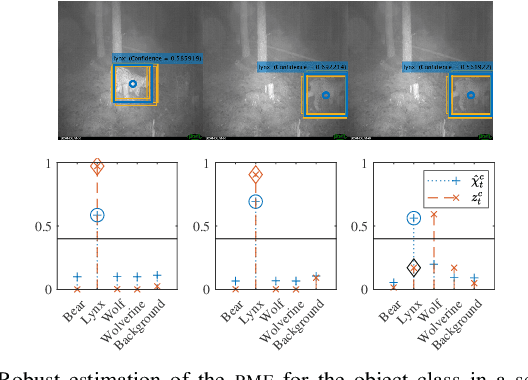
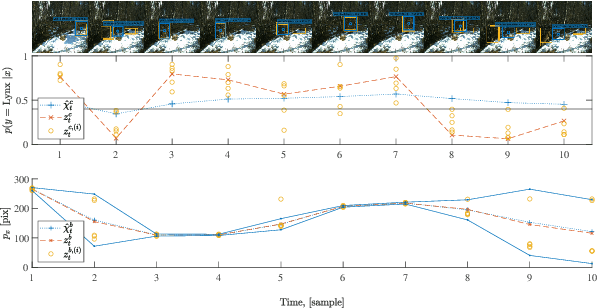
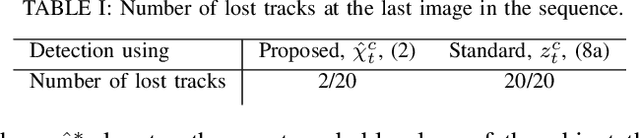
This paper considers the problem of detecting and tracking objects in a sequence of images. The problem is formulated in a filtering framework, using the output of object-detection algorithms as measurements. An extension to the filtering formulation is proposed that incorporates class information from the previous frame to robustify the classification, even if the object-detection algorithm outputs an incorrect prediction. Further, the properties of the object-detection algorithm are exploited to quantify the uncertainty of the bounding box detection in each frame. The complete filtering method is evaluated on camera trap images of the four large Swedish carnivores, bear, lynx, wolf, and wolverine. The experiments show that the class tracking formulation leads to a more robust classification.
Fusion framework and multimodality for the Laplacian approximation of Bayesian neural networks
Oct 12, 2023This paper considers the problem of sequential fusion of predictions from neural networks (NN) and fusion of predictions from multiple NN. This fusion strategy increases the robustness, i.e., reduces the impact of one incorrect classification and detection of outliers the \nn has not seen during training. This paper uses Laplacian approximation of Bayesian NNs (BNNs) to quantify the uncertainty necessary for fusion. Here, an extension is proposed such that the prediction of the NN can be represented by multimodal distributions. Regarding calibration of the estimated uncertainty in the prediction, the performance is significantly improved by having the flexibility to represent a multimodal distribution. Two class classical image classification tasks, i.e., MNIST and CFAR10, and image sequences from camera traps of carnivores in Swedish forests have been used to demonstrate the fusion strategies and proposed extension to the Laplacian approximation.
Uncertainty quantification in neural network classifiers -- a local linear approach
Mar 10, 2023Classifiers based on neural networks (NN) often lack a measure of uncertainty in the predicted class. We propose a method to estimate the probability mass function (PMF) of the different classes, as well as the covariance of the estimated PMF. First, a local linear approach is used during the training phase to recursively compute the covariance of the parameters in the NN. Secondly, in the classification phase another local linear approach is used to propagate the covariance of the learned NN parameters to the uncertainty in the output of the last layer of the NN. This allows for an efficient Monte Carlo (MC) approach for: (i) estimating the PMF; (ii) calculating the covariance of the estimated PMF; and (iii) proper risk assessment and fusion of multiple classifiers. Two classical image classification tasks, i.e., MNIST, and CFAR10, are used to demonstrate the efficiency the proposed method.
PMBM filter with partially grid-based birth model with applications in sensor management
Mar 19, 2021
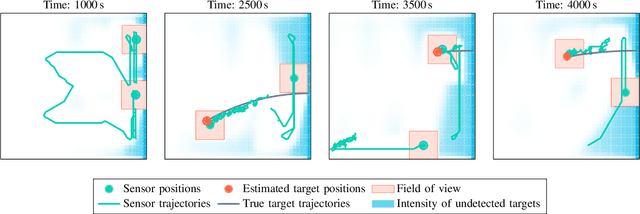

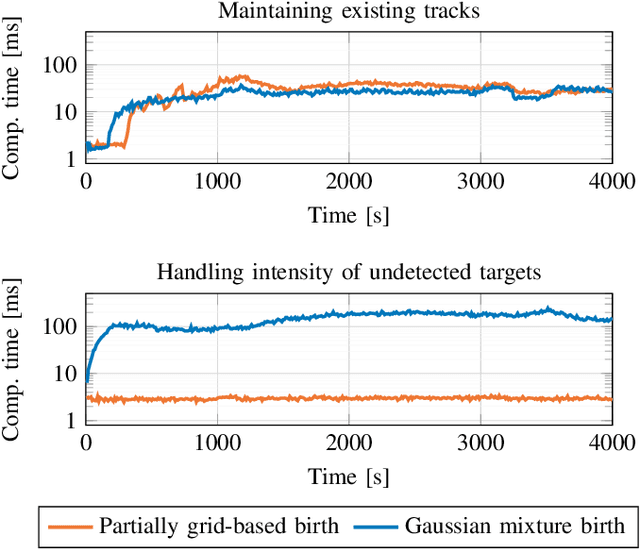
This paper introduces a Poisson multi-Bernoulli mixture (PMBM) filter in which the intensities of target birth and undetected targets are grid-based. A simplified version of the Rao-Blackwellized point mass filter is used to predict the intensity of undetected targets, and the density of targets detected for the first time are approximated as Gaussian. Whereas conventional PMBM filter implementations typically use Gaussian mixtures to model the intensity of undetected targets, the proposed representation allows the intensity to vary over the region of interest with sharp edges around the sensor's field of view, without using a large number of Gaussian mixture components. This reduces the computational complexity compared to the conventional approach. The proposed method is illustrated in a sensor management setting where trajectories of sensors with limited fields of view are controlled to search for and track the targets in a region of interest.
Estimation-aware model predictive path-following control for a general 2-trailer with a car-like tractor
Mar 07, 2020
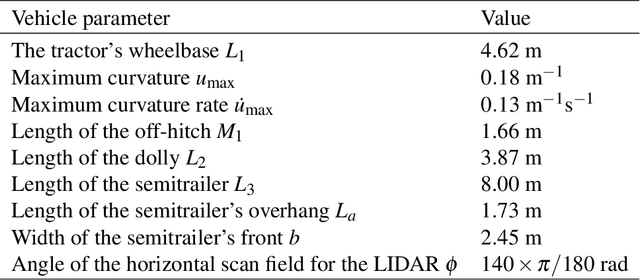
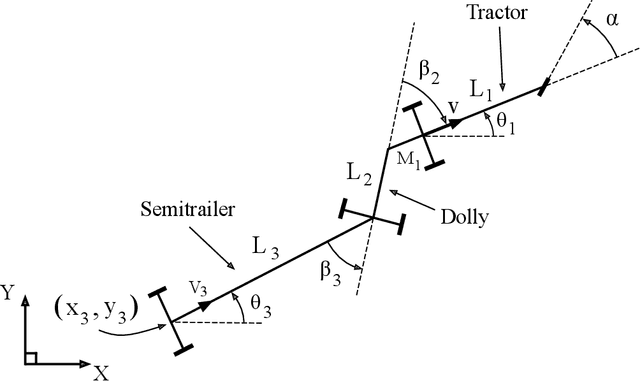
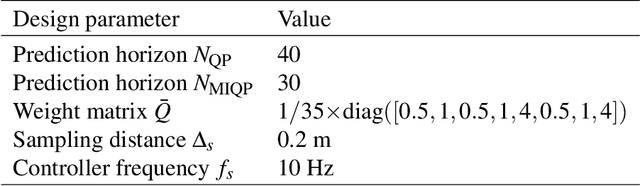
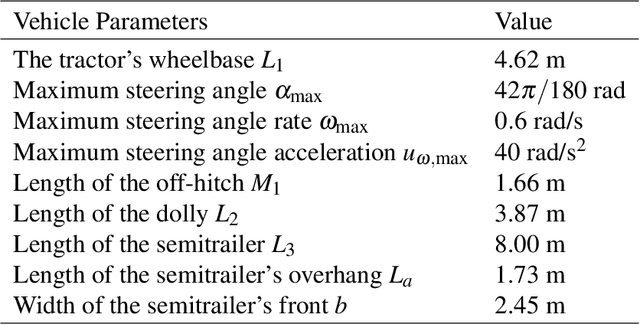
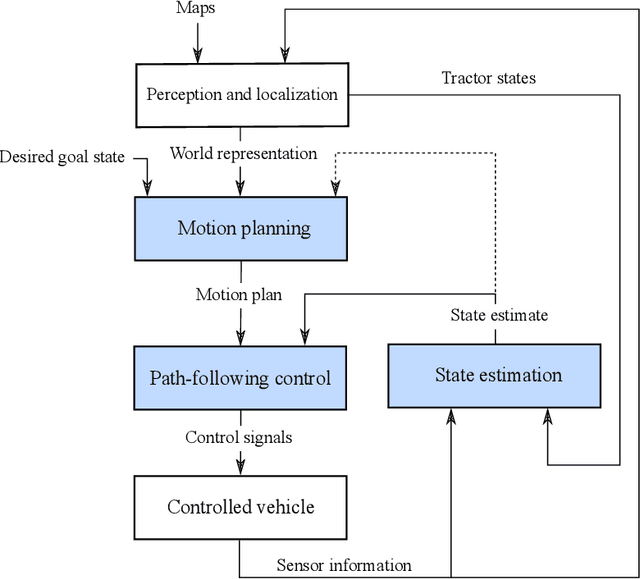
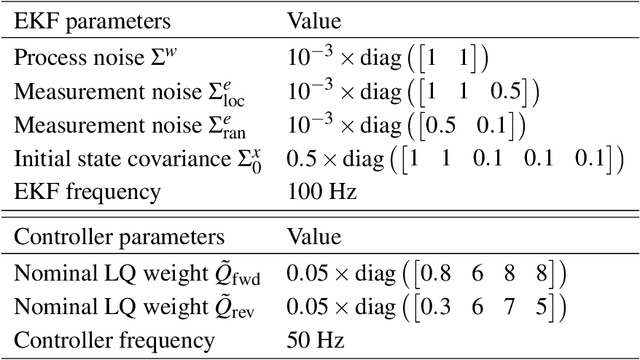
The design of the path-following controller is crucial for reliable autonomous vehicle operation. This design problem is especially challenging for a general 2-trailer with a car-like tractor due to the vehicle's unstable joint-angle kinematics in backward motion. Additionally, advanced sensors placed in the rear of the tractor have been proposed to solve the joint-angle estimation problem. Since these sensors typically have a limited field of view, the estimation solution introduces restrictions on the joint-angle configurations that can be estimated with high accuracy. To explicitly consider these constraints in the controller, a model predictive path-following control approach is proposed. Two approaches with different computation complexity and performance are presented. In the first approach, the joint-angle constraints are modeled as a union of convex polytopes, making it necessary to incorporate binary decision variables. The second approach avoids binary variables at the expense of a more conservative controller. In simulations and field experiments, the performance of the proposed path-following control approach is compared with a previously proposed control strategy.
On sensing-aware model predictive path-following control for a reversing general 2-trailer with a car-like tractor
Feb 20, 2020
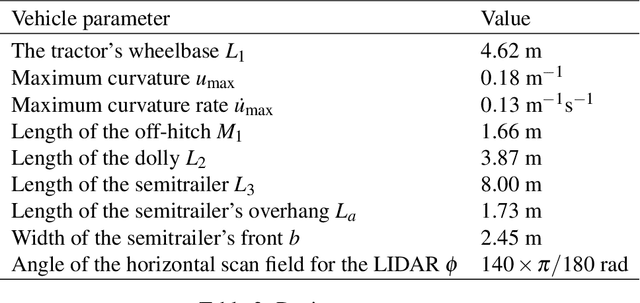

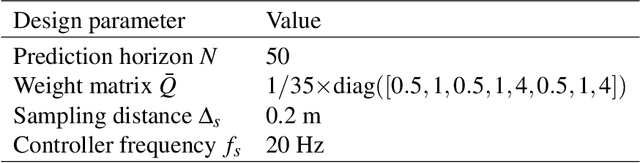
The design of reliable path-following controllers is a key ingredient for successful deployment of self-driving vehicles. This controller-design problem is especially challenging for a general 2-trailer with a car-like tractor due to the vehicle's structurally unstable joint-angle kinematics in backward motion and the car-like tractor's curvature limitations which can cause the vehicle segments to fold and enter a jackknife state. Furthermore, advanced sensors with a limited field of view have been proposed to solve the joint-angle estimation problem online, which introduce additional restrictions on which vehicle states that can be reliably estimated. To incorporate these restrictions at the level of control, a model predictive path-following controller is proposed. By taking the vehicle's physical and sensing limitations into account, it is shown in real-world experiments that the performance of the proposed path-following controller in terms of suppressing disturbances and recovering from non-trivial initial states is significantly improved compared to a previously proposed solution where the constraints have been neglected.
Optimization-based motion planning for multi-steered articulated vehicles
Dec 12, 2019
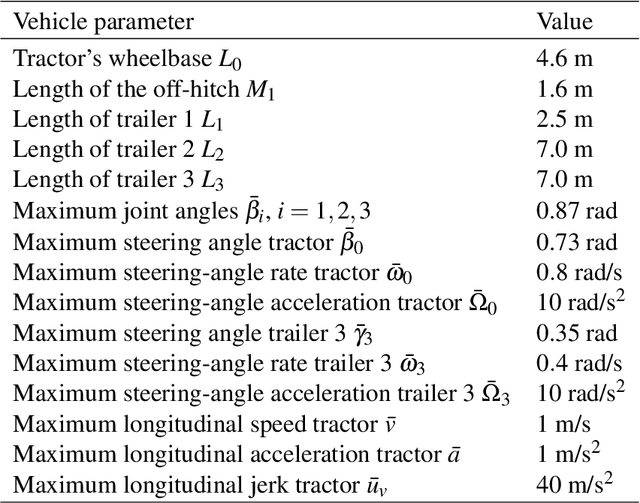
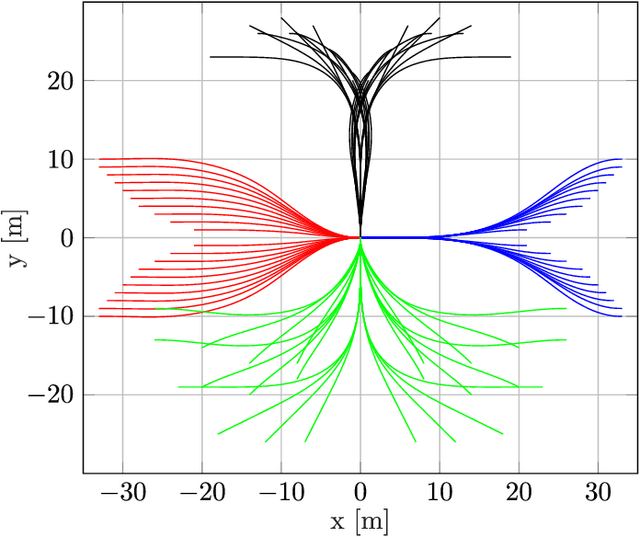

The task of maneuvering a multi-steered articulated vehicle in confined environments is difficult even for experienced drivers. In this work, we present an optimization-based trajectory planner targeting low-speed maneuvers in unstructured environments for multi-steered N-trailer vehicles, which are comprised of a car-like tractor and an arbitrary number of interconnected trailers with fixed or steerable wheels. The proposed trajectory planning framework is divided into two steps, where a lattice-based trajectory planner is used in a first step to compute a resolution optimal solution to a discretized version of the trajectory planning problem. The output from the lattice planner is then used in a second step to initialize an optimal control problem solver, which enables the framework to compute locally optimal trajectories that start at the vehicle's initial state and reaches the goal state exactly. The performance of the proposed optimization-based trajectory planner is evaluated in a set of practically relevant scenarios for a multi-steered 3-trailer vehicle with a car-like tractor where the last trailer is steerable.
A path planning and path-following control framework for a general 2-trailer with a car-like tractor
Apr 02, 2019
Maneuvering a general 2-trailer with a car-like tractor in backward motion is a task that requires significant skill to master and is unarguably one of the most complicated tasks a truck driver has to perform. This paper presents a path planning and path-following control solution that can be used to automatically plan and execute difficult parking and obstacle avoidance maneuvers by combining backward and forward motion. A lattice-based path planning framework is developed in order to generate kinematically feasible and collision-free paths and a path-following controller is designed to stabilize the lateral and angular path-following error states during path execution. To estimate the vehicle states needed for control, a nonlinear observer is developed which only utilizes information from sensors that are mounted on the car-like tractor, making the system independent of additional trailer sensors. The proposed path planning and path-following control framework is implemented on a full-scale test vehicle and results from simulations and real-world experiments are presented.
Path tracking and stabilization for a reversing general 2-trailer configuration using a cascaded control approach
Feb 22, 2016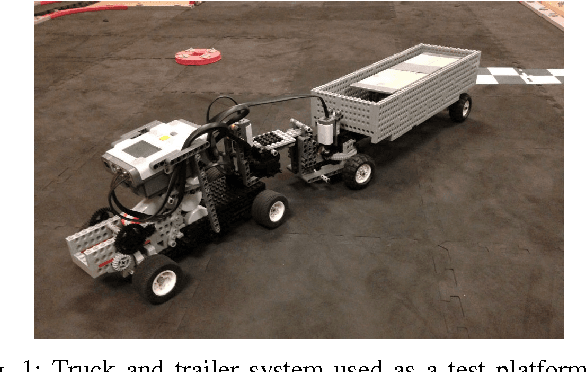
In this paper a cascaded approach for stabilization and path tracking of a general 2-trailer vehicle configuration with an off-axle hitching is presented. A low level Linear Quadratic controller is used for stabilization of the internal angles while a pure pursuit path tracking controller is used on a higher level to handle the path tracking. Piecewise linearity is the only requirement on the control reference which makes the design of reference paths very general. A Graphical User Interface is designed to make it easy for a user to design control references for complex manoeuvres given some representation of the surroundings. The approach is demonstrated with challenging path following scenarios both in simulation and on a small scale test platform.