 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePilot-Free Predictive Multi-User Beamforming via Sensing Management in Cell-Free Networks
Apr 21, 2026This paper presents a sensing management frame- work for integrated sensing and communications (ISAC) within cell-free massive multiple-input multiple-output (MIMO) systems to reduce pilot-based channel state information (CSI) acquisition overhead. Conventional communication systems rely on frequent channel estimation procedures that impose significant signaling overhead, consuming valuable time-frequency resources. To ad- dress this inefficiency, we propose a state-based architecture that partitions users into communication and sensing groups based on service requirements. When users are not requesting data, the system utilizes sensing capabilities to track their location. Upon receiving a communication request, the system transitions to communication mode, leveraging the tracked state for predictive beamforming to eliminate the need for uplink pilot training. We develop an extended Kalman filter (EKF) based tracking algorithm coupled with adaptive resource allocation strategies. Furthermore, we analyze the impact of inter-target interference and design a sensing management protocol that performs sensing operations only when necessary to maintain the accuracy of user location estimates. Simulation results demonstrate that the pro- posed EKF-based tracking and sensing management can support predictive beamforming with downlink spectral efficiency close to the perfect-CSI case, while requiring sensing only occasionally after an initial convergence period. The results also indicate that this performance is robust in a cell-free massive MIMO setup and can be achieved with practical sensing waveforms.
Path Planning for Sound Speed Profile Estimation
Mar 11, 2026Accurate estimation of the sound speed profile (SSP) is essential for underwater acoustic communication, sonar performance, and navigation, as the acoustic wave propagation depends strongly on the SSP. This work considers SSP estimation in a region of interest using an autonomous underwater vehicle (AUV) equipped with a conductivity-temperature-depth (CTD) sensor and an acoustic receiver measuring transmission loss (TL) from a sonar transmitter. The SSP is modeled using a linear basis-function expansion and is sequentially estimated with an unscented Kalman filter that fuses local CTD measurements with TL measurements. A receding-horizon path planning scheme is also employed to select future AUV positions by minimizing the predicted total sound speed variance. Simulations using the Bellhop acoustic wave propagation solver show that CTD measurements provide accurate local SSP estimates, whereas TL measurements are seen to capture the global characteristics of the SSP, with their joint use improving the reconstruction of both local variations and large-scale SSP behavior. The results also indicate that the proposed path planning strategy reduces the estimation uncertainty compared to constant-velocity motion, thereby enabling improved environmental characterization for underwater acoustic systems.
Tracking Time-Varying Multipath Channels forActive Sonar Applications
Feb 17, 2026Reliable detection and tracking in active sonar require accurate and efficient learning of the acoustic multipath background environment. Conventionally, background learning is performed after transforming measurements into the range-Doppler domain, a step that is computationally expensive and can obscure phase-coherent structure useful for monitoring and tracking. This paper proposes a framework for learning and tracking the multipath background directly in the raw measurement domain. Starting from a wideband Doppler linearization of the impulse response of a time-varying multipath channel, a state-space model with a heteroscedastic measurement equation is derived. This model enables channel tracking using an extended Kalman filter (EKF), and unknown model parameters are learned from the marginalized likelihood. The statistical adequacy of the proposed models is assessed via a p-value significance test. Finally, this paper integrates the learned channel model into a sequential likelihood-ratio test for target detection. BELLHOP-based simulations show that the proposed model better captures channel dynamics induced by sea-surface fluctuations and transmitter and receiver drift, yielding more reliable detection in time-varying shallow-water environments
Localization Exploiting Spatial Variations in the Magnetic Field: Principles and Challenges
Feb 15, 2026Signal processing has played, and continues to play, a fundamental role in the evolution of modern localization technologies. Localization using spatial variations in the Earth's magnetic field is no exception. It relies on signal-processing methods for statistical state inference, magnetic-field modeling, and sensor calibration. Contemporary localization techniques based on spatial variations in the magnetic field can provide decimeter-level indoor localization accuracy and outdoor localization accuracy on par with strategic-grade inertial navigation systems. This article provides a broad, high-level overview of current signal-processing principles and open research challenges in localization using spatial variations in the Earth's magnetic field. The aim is to provide the reader with an understanding of the similarities and differences among existing key technologies from a statistical signal-processing perspective. To that end, existing key technologies will be presented within a common parametric signal-model framework compatible with well-established statistical inference methods.
Inertial Magnetic SLAM Systems Using Low-Cost Sensors
Dec 10, 2025Spatially inhomogeneous magnetic fields offer a valuable, non-visual information source for positioning. Among systems leveraging this, magnetic field-based simultaneous localization and mapping (SLAM) systems are particularly attractive because they can provide positioning information and build a magnetic field map on the fly. Moreover, they have bounded error within mapped regions. However, state-of-the-art methods typically require low-drift odometry data provided by visual odometry or a wheel encoder, etc. This is because these systems need to minimize/reduce positioning errors while exploring, which happens when they are in unmapped regions. To address these limitations, this work proposes a loosely coupled and a tightly coupled inertial magnetic SLAM (IM-SLAM) system. The proposed systems use commonly available low-cost sensors: an inertial measurement unit (IMU), a magnetometer array, and a barometer. The use of non-visual data provides a significant advantage over visual-based systems, making it robust to low-visibility conditions. Both systems employ state-space representations, and magnetic field models on different scales. The difference lies in how they use a local and global magnetic field model. The loosely coupled system uses these models separately in two state-space models, while the tightly coupled system integrates them into one state-space model. Experiment results show that the tightly coupled IM-SLAM system achieves lower positioning errors than the loosely coupled system in most scenarios, with typical errors on the order of meters per 100 meters traveled. These results demonstrate the feasiblity of developing a full 3D IM-SLAM systems using low-cost sensors and the potential of applying these systems in emergency response scenarios such as mine/fire rescue.
Sensing Management for Pilot-Free Predictive Beamforming in Cell-Free Massive MIMO Systems
Oct 08, 2025This paper introduces a sensing management method for integrated sensing and communications (ISAC) in cell-free massive multiple-input multiple-output (MIMO) systems. Conventional communication systems employ channel estimation procedures that impose significant overhead during data transmission, consuming resources that could otherwise be utilized for data. To address this challenge, we propose a state-based approach that leverages sensing capabilities to track the user when there is no communication request. Upon receiving a communication request, predictive beamforming is employed based on the tracked user position, thereby reducing the need for channel estimation. Our framework incorporates an extended Kalman filter (EKF) based tracking algorithm with adaptive sensing management to perform sensing operations only when necessary to maintain high tracking accuracy. The simulation results demonstrate that our proposed sensing management approach provides uniform downlink communication rates that are higher than with existing methods by achieving overhead-free predictive beamforming.
Performance Analysis of Communication Signals for Localization in Underwater Sensor Networks
Jun 16, 2025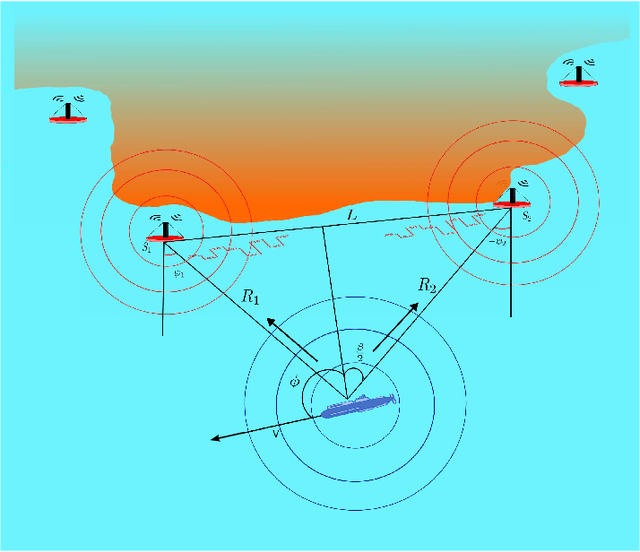
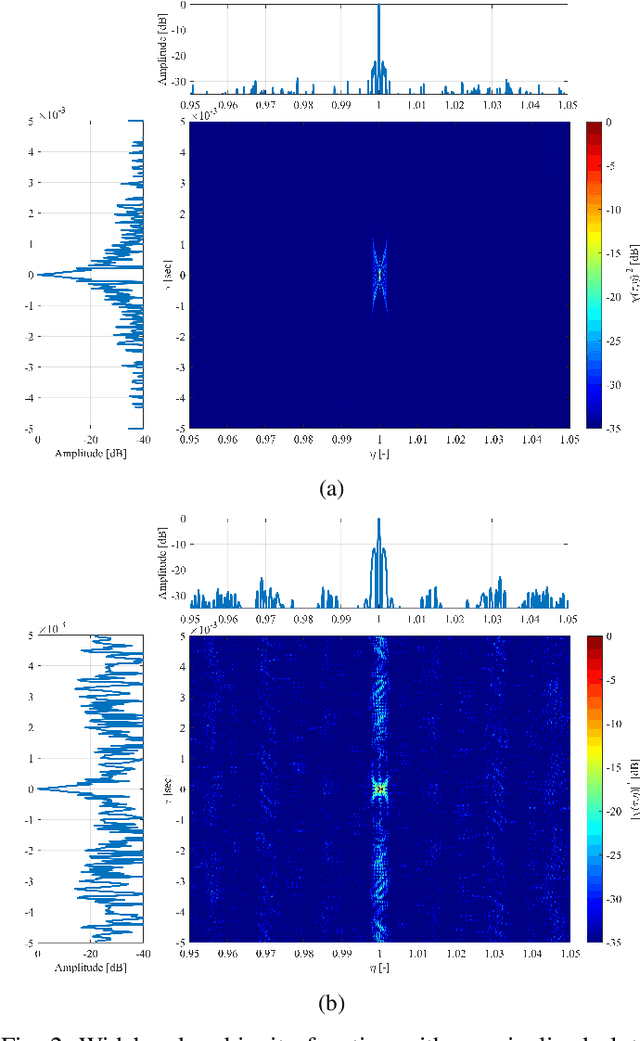
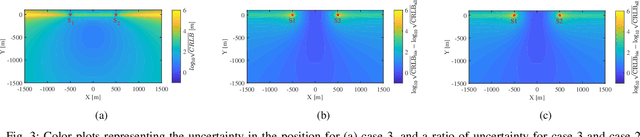
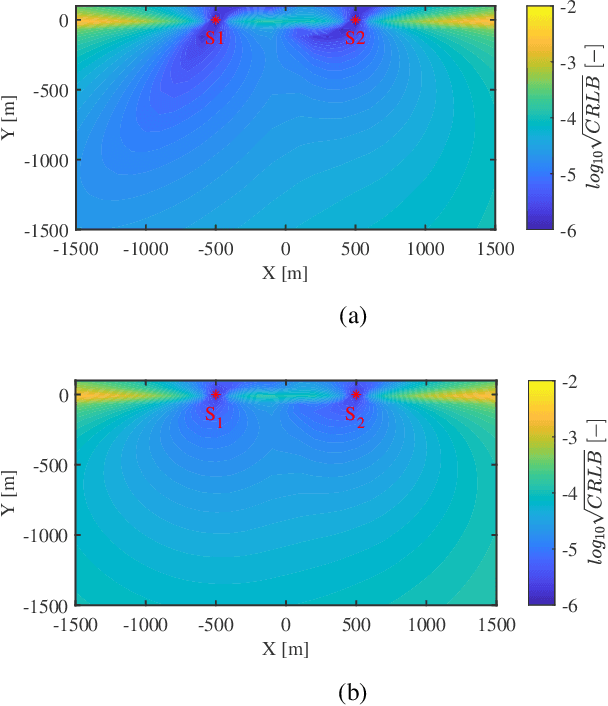
Fusion of passive and active measurements from sensor nodes becomes critical in localizing underwater objects and is traditionally achieved by communicating information to a central node. This causes significant inefficiencies in bandwidth, energy, and processing time, which are critical in marine applications. With integrated sensing and communication (ISAC) systems, the process of sensing, localization, and communication can be achieved jointly, and the inefficiencies can be minimized. Thus, the primary objective of this study is to analyse the efficacy of such communication signals in localizing a moving target in given underwater conditions. The Cram\'er-Rao Lower Bound (CRLB) is a performance metric used to determine the theoretical lower bound on localization errors. Simulation results illustrate the contours of localization error across various scenarios, offering valuable insights into system performance under different target dynamics and sea state conditions, showcasing their potential for efficient and reliable underwater localization applications.
Joint Magnetometer-IMU Calibration via Maximum A Posteriori Estimation
May 22, 2025



This paper presents a new approach for jointly calibrating magnetometers and inertial measurement units, focusing on improving calibration accuracy and computational efficiency. The proposed method formulates the calibration problem as a maximum a posteriori estimation problem, treating both the calibration parameters and orientation trajectory of the sensors as unknowns. This formulation enables efficient optimization with closed-form derivatives. The method is compared against two state-of-the-art approaches in terms of computational complexity and estimation accuracy. Simulation results demonstrate that the proposed method achieves lower root mean square error in calibration parameters while maintaining competitive computational efficiency. Further validation through real-world experiments confirms the practical benefits of our approach: it effectively reduces position drift in a magnetic field-aided inertial navigation system by more than a factor of two on most datasets. Moreover, the proposed method calibrated 30 magnetometers in less than 2 minutes. The contributions include a new calibration method, an analysis of existing methods, and a comprehensive empirical evaluation. Datasets and algorithms are made publicly available to promote reproducible research.
On the Connection Between Magnetic-Field Odometry Aided Inertial Navigation and Magnetic-Field SLAM
Mar 06, 2025



Magnetic-field simultaneous localization and mapping (SLAM) using consumer-grade inertial and magnetometer sensors offers a scalable, cost-effective solution for indoor localization. However, the rapid error accumulation in the inertial navigation process limits the feasible exploratory phases of these systems. Advances in magnetometer array processing have demonstrated that odometry information, i.e., displacement and rotation information, can be extracted from local magnetic field variations and used to create magnetic-field odometry-aided inertial navigation systems. The error growth rate of these systems is significantly lower than that of standalone inertial navigation systems. This study seeks an answer to whether a magnetic-field SLAM system fed with measurements from a magnetometer array can indirectly extract odometry information -- without requiring algorithmic modifications -- and thus sustain longer exploratory phases. The theoretical analysis and simulation results show that such a system can extract odometry information and indirectly create a magnetic field odometry-aided inertial navigation system during the exploration phases. However, practical challenges related to map resolution and computational complexity remain significant.
Broadband Passive Sonar Track-Before-Detect Using Raw Acoustic Data
Dec 20, 2024



This article concerns the challenge of reliable broadband passive sonar target detection and tracking in complex acoustic environments. Addressing this challenge is becoming increasingly crucial for safeguarding underwater infrastructure, monitoring marine life, and providing defense during seabed warfare. To that end, a solution is proposed based on a vector-autoregressive model for the ambient noise and a heavy-tailed statistical model for the distribution of the raw hydrophone data. These models are integrated into a Bernoulli track-before-detect (TkBD) filter that estimates the probability of target existence, target bearing, and signal-to-noise ratio (SNR). The proposed solution is evaluated on both simulated and real-world data, demonstrating the effectiveness of the proposed ambient noise modeling and the statistical model for the raw hydrophone data samples to obtain early target detection and robust target tracking. The simulations show that the SNR at which the target can be detected is reduced by 4 dB compared to when using the standard constant false alarm rate detector-based tracker. Further, the test with real-world data shows that the proposed solution increases the target detection distance from 250 m to 390 m. The presented results illustrate that the TkBD technology, in combination with data-driven ambient noise modeling and heavy-tailed statistical signal models, can enable reliable broadband passive sonar target detection and tracking in complex acoustic environments and lower the SNR required to detect and track targets.