 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Magnetic SLAM Systems Using Low-Cost Sensors
Dec 10, 2025Spatially inhomogeneous magnetic fields offer a valuable, non-visual information source for positioning. Among systems leveraging this, magnetic field-based simultaneous localization and mapping (SLAM) systems are particularly attractive because they can provide positioning information and build a magnetic field map on the fly. Moreover, they have bounded error within mapped regions. However, state-of-the-art methods typically require low-drift odometry data provided by visual odometry or a wheel encoder, etc. This is because these systems need to minimize/reduce positioning errors while exploring, which happens when they are in unmapped regions. To address these limitations, this work proposes a loosely coupled and a tightly coupled inertial magnetic SLAM (IM-SLAM) system. The proposed systems use commonly available low-cost sensors: an inertial measurement unit (IMU), a magnetometer array, and a barometer. The use of non-visual data provides a significant advantage over visual-based systems, making it robust to low-visibility conditions. Both systems employ state-space representations, and magnetic field models on different scales. The difference lies in how they use a local and global magnetic field model. The loosely coupled system uses these models separately in two state-space models, while the tightly coupled system integrates them into one state-space model. Experiment results show that the tightly coupled IM-SLAM system achieves lower positioning errors than the loosely coupled system in most scenarios, with typical errors on the order of meters per 100 meters traveled. These results demonstrate the feasiblity of developing a full 3D IM-SLAM systems using low-cost sensors and the potential of applying these systems in emergency response scenarios such as mine/fire rescue.
Road Roughness Estimation via Fusion of Standard Onboard Automotive Sensors
Jul 16, 2025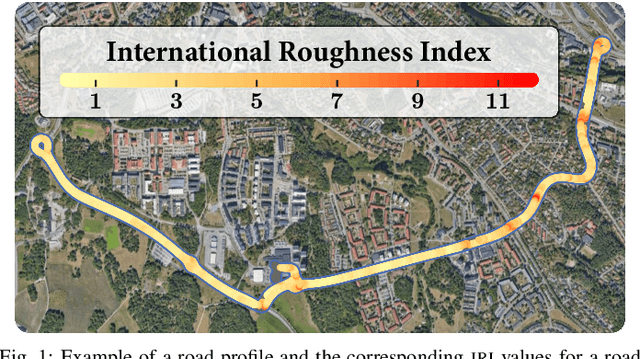
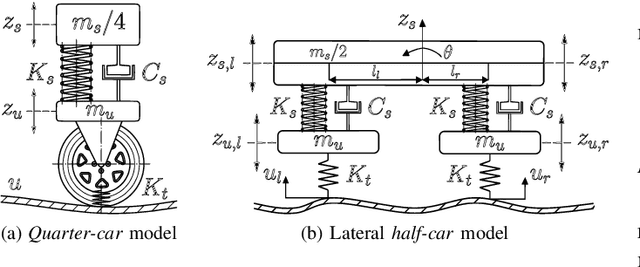
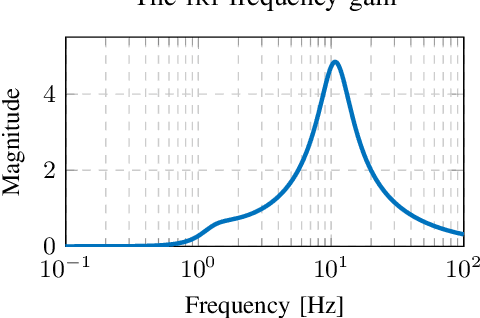
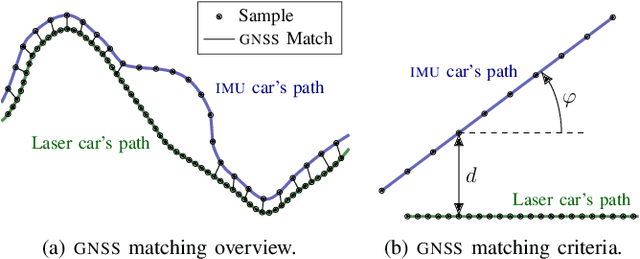
Road roughness significantly affects vehicle vibrations and ride quality. We introduce a Kalman filter (KF)-based method for estimating road roughness in terms of the international roughness index (IRI) by fusing inertial and speed measurements, offering a cost-effective solution for pavement monitoring. The method involves system identification on a physical vehicle to estimate realistic model parameters, followed by KF-based reconstruction of the longitudinal road profile to compute IRI values. It explores IRI estimation using vertical and lateral vibrations, the latter more common in modern vehicles. Validation on 230 km of real-world data shows promising results, with IRI estimation errors ranging from 1% to 10% of the reference values. However, accuracy deteriorates significantly when using only lateral vibrations, highlighting their limitations. These findings demonstrate the potential of KF-based estimation for efficient road roughness monitoring.
Performance Analysis of Communication Signals for Localization in Underwater Sensor Networks
Jun 16, 2025Fusion of passive and active measurements from sensor nodes becomes critical in localizing underwater objects and is traditionally achieved by communicating information to a central node. This causes significant inefficiencies in bandwidth, energy, and processing time, which are critical in marine applications. With integrated sensing and communication (ISAC) systems, the process of sensing, localization, and communication can be achieved jointly, and the inefficiencies can be minimized. Thus, the primary objective of this study is to analyse the efficacy of such communication signals in localizing a moving target in given underwater conditions. The Cram\'er-Rao Lower Bound (CRLB) is a performance metric used to determine the theoretical lower bound on localization errors. Simulation results illustrate the contours of localization error across various scenarios, offering valuable insights into system performance under different target dynamics and sea state conditions, showcasing their potential for efficient and reliable underwater localization applications.
Joint Magnetometer-IMU Calibration via Maximum A Posteriori Estimation
May 22, 2025This paper presents a new approach for jointly calibrating magnetometers and inertial measurement units, focusing on improving calibration accuracy and computational efficiency. The proposed method formulates the calibration problem as a maximum a posteriori estimation problem, treating both the calibration parameters and orientation trajectory of the sensors as unknowns. This formulation enables efficient optimization with closed-form derivatives. The method is compared against two state-of-the-art approaches in terms of computational complexity and estimation accuracy. Simulation results demonstrate that the proposed method achieves lower root mean square error in calibration parameters while maintaining competitive computational efficiency. Further validation through real-world experiments confirms the practical benefits of our approach: it effectively reduces position drift in a magnetic field-aided inertial navigation system by more than a factor of two on most datasets. Moreover, the proposed method calibrated 30 magnetometers in less than 2 minutes. The contributions include a new calibration method, an analysis of existing methods, and a comprehensive empirical evaluation. Datasets and algorithms are made publicly available to promote reproducible research.
On the Connection Between Magnetic-Field Odometry Aided Inertial Navigation and Magnetic-Field SLAM
Mar 06, 2025



Magnetic-field simultaneous localization and mapping (SLAM) using consumer-grade inertial and magnetometer sensors offers a scalable, cost-effective solution for indoor localization. However, the rapid error accumulation in the inertial navigation process limits the feasible exploratory phases of these systems. Advances in magnetometer array processing have demonstrated that odometry information, i.e., displacement and rotation information, can be extracted from local magnetic field variations and used to create magnetic-field odometry-aided inertial navigation systems. The error growth rate of these systems is significantly lower than that of standalone inertial navigation systems. This study seeks an answer to whether a magnetic-field SLAM system fed with measurements from a magnetometer array can indirectly extract odometry information -- without requiring algorithmic modifications -- and thus sustain longer exploratory phases. The theoretical analysis and simulation results show that such a system can extract odometry information and indirectly create a magnetic field odometry-aided inertial navigation system during the exploration phases. However, practical challenges related to map resolution and computational complexity remain significant.
Broadband Passive Sonar Track-Before-Detect Using Raw Acoustic Data
Dec 20, 2024



This article concerns the challenge of reliable broadband passive sonar target detection and tracking in complex acoustic environments. Addressing this challenge is becoming increasingly crucial for safeguarding underwater infrastructure, monitoring marine life, and providing defense during seabed warfare. To that end, a solution is proposed based on a vector-autoregressive model for the ambient noise and a heavy-tailed statistical model for the distribution of the raw hydrophone data. These models are integrated into a Bernoulli track-before-detect (TkBD) filter that estimates the probability of target existence, target bearing, and signal-to-noise ratio (SNR). The proposed solution is evaluated on both simulated and real-world data, demonstrating the effectiveness of the proposed ambient noise modeling and the statistical model for the raw hydrophone data samples to obtain early target detection and robust target tracking. The simulations show that the SNR at which the target can be detected is reduced by 4 dB compared to when using the standard constant false alarm rate detector-based tracker. Further, the test with real-world data shows that the proposed solution increases the target detection distance from 250 m to 390 m. The presented results illustrate that the TkBD technology, in combination with data-driven ambient noise modeling and heavy-tailed statistical signal models, can enable reliable broadband passive sonar target detection and tracking in complex acoustic environments and lower the SNR required to detect and track targets.
Adaptive Basis Function Selection for Computationally Efficient Predictions
Aug 14, 2024Basis Function (BF) expansions are a cornerstone of any engineer's toolbox for computational function approximation which shares connections with both neural networks and Gaussian processes. Even though BF expansions are an intuitive and straightforward model to use, they suffer from quadratic computational complexity in the number of BFs if the predictive variance is to be computed. We develop a method to automatically select the most important BFs for prediction in a sub-domain of the model domain. This significantly reduces the computational complexity of computing predictions while maintaining predictive accuracy. The proposed method is demonstrated using two numerical examples, where reductions up to 50-75% are possible without significantly reducing the predictive accuracy.
Joint State and Parameter Estimation Using the Partial Errors-in-Variables Principle
Jul 01, 2024

This letter proposes a new method for joint state and parameter estimation in uncertain dynamical systems. We exploit the partial errors-in-variables (PEIV) principle and formulate a regression problem in the sense of weighted total least squares, where the uncertainty in the parameter prior is explicitly considered. Based thereon, the PEIV regression can be solved iteratively through the Kalman smoothing and the regularized least squares for estimating the state and the parameter, respectively. The simulations demonstrate improved accuracy of the proposed method compared to existing approaches, including the joint maximum a posterior-maximum likelihood, the expectation maximisation, and the augmented state extended Kalman smoother.
An Observability-Constrained Magnetic-Field-Aided Inertial Navigation System
Jun 04, 2024



A method to construct an observability-constrained magnetic-field-aided inertial navigation system is proposed. The proposed method builds upon the previously proposed observability-constrained extended Kalman filter and extends it to work with a magnetic-field-based odometry-aided inertial navigation system. The proposed method is evaluated using simulation and real-world data, showing that (i) the system observability properties are preserved, (ii) the estimation accuracy increases, and (iii) the perceived uncertainty calculated by the EKF is more consistent with the true uncertainty of the filter estimates.
Matrix-Valued Measures and Wishart Statistics for Target Tracking Applications
Jun 02, 2024



Ensuring sufficiently accurate models is crucial in target tracking systems. If the assumed models deviate too much from the truth, the tracking performance might be severely degraded. While the models are in general defined using multivariate conditions, the measures used to validate them are most often scalar-valued. In this paper, we propose matrix-valued measures for both offline and online assessment of target tracking systems. Recent results from Wishart statistics, and approximations thereof, are adapted and it is shown how these can be incorporated to infer statistical properties for the eigenvalues of the proposed measures. In addition, we relate these results to the statistics of the baseline measures. Finally, the applicability of the proposed measures are demonstrated using two important problems in target tracking: (i) distributed track fusion design; and (ii) filter model mismatch detection.