 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Roughness Estimation via Fusion of Standard Onboard Automotive Sensors
Jul 16, 2025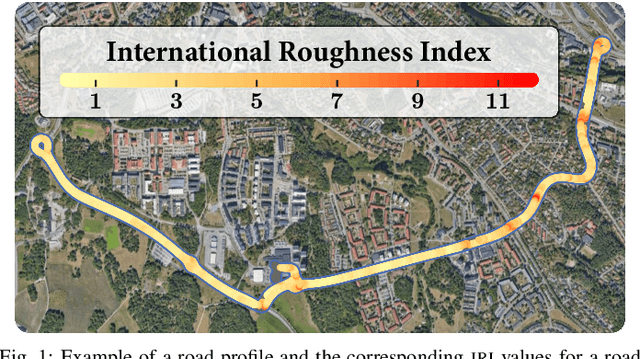
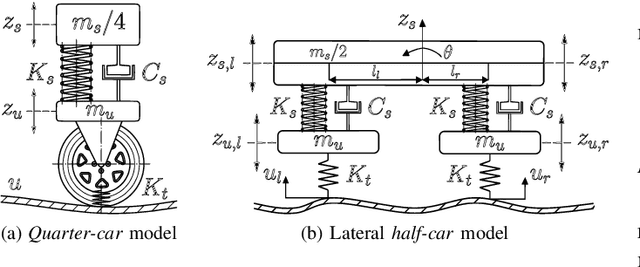
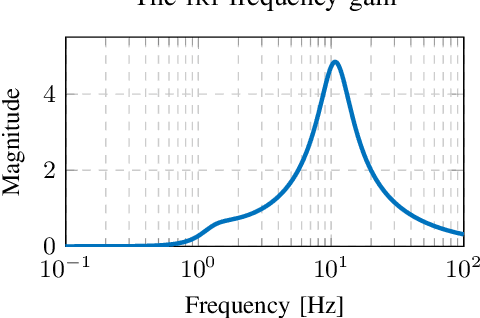
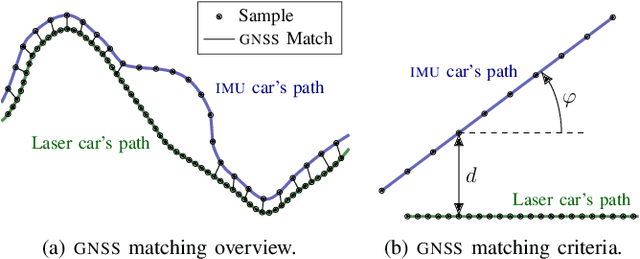
Road roughness significantly affects vehicle vibrations and ride quality. We introduce a Kalman filter (KF)-based method for estimating road roughness in terms of the international roughness index (IRI) by fusing inertial and speed measurements, offering a cost-effective solution for pavement monitoring. The method involves system identification on a physical vehicle to estimate realistic model parameters, followed by KF-based reconstruction of the longitudinal road profile to compute IRI values. It explores IRI estimation using vertical and lateral vibrations, the latter more common in modern vehicles. Validation on 230 km of real-world data shows promising results, with IRI estimation errors ranging from 1% to 10% of the reference values. However, accuracy deteriorates significantly when using only lateral vibrations, highlighting their limitations. These findings demonstrate the potential of KF-based estimation for efficient road roughness monitoring.
Improving Wildlife Out-of-Distribution Detection: Africas Big Five
Jun 07, 2025Mitigating human-wildlife conflict seeks to resolve unwanted encounters between these parties. Computer Vision provides a solution to identifying individuals that might escalate into conflict, such as members of the Big Five African animals. However, environments often contain several varied species. The current state-of-the-art animal classification models are trained under a closed-world assumption. They almost always remain overconfident in their predictions even when presented with unknown classes. This study investigates out-of-distribution (OOD) detection of wildlife, specifically the Big Five. To this end, we select a parametric Nearest Class Mean (NCM) and a non-parametric contrastive learning approach as baselines to take advantage of pretrained and projected features from popular classification encoders. Moreover, we compare our baselines to various common OOD methods in the literature. The results show feature-based methods reflect stronger generalisation capability across varying classification thresholds. Specifically, NCM with ImageNet pre-trained features achieves a 2%, 4% and 22% improvement on AUPR-IN, AUPR-OUT and AUTC over the best OOD methods, respectively. The code can be found here https://github.com/pxpana/BIG5OOD
Joint State and Parameter Estimation Using the Partial Errors-in-Variables Principle
Jul 01, 2024

This letter proposes a new method for joint state and parameter estimation in uncertain dynamical systems. We exploit the partial errors-in-variables (PEIV) principle and formulate a regression problem in the sense of weighted total least squares, where the uncertainty in the parameter prior is explicitly considered. Based thereon, the PEIV regression can be solved iteratively through the Kalman smoothing and the regularized least squares for estimating the state and the parameter, respectively. The simulations demonstrate improved accuracy of the proposed method compared to existing approaches, including the joint maximum a posterior-maximum likelihood, the expectation maximisation, and the augmented state extended Kalman smoother.
Extended target tracking utilizing machine-learning software -- with applications to animal classification
Oct 12, 2023
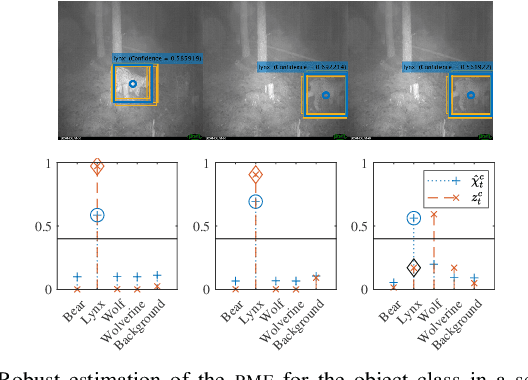
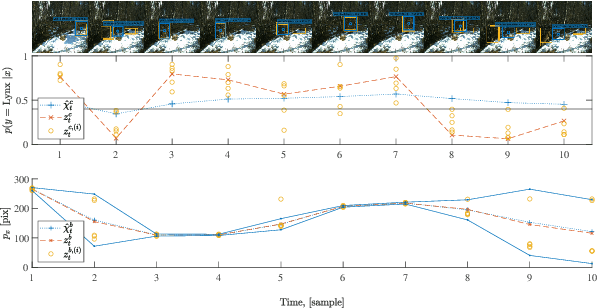
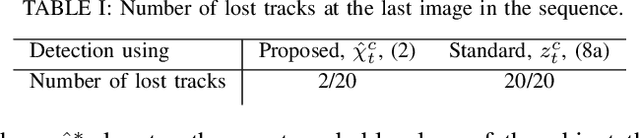
This paper considers the problem of detecting and tracking objects in a sequence of images. The problem is formulated in a filtering framework, using the output of object-detection algorithms as measurements. An extension to the filtering formulation is proposed that incorporates class information from the previous frame to robustify the classification, even if the object-detection algorithm outputs an incorrect prediction. Further, the properties of the object-detection algorithm are exploited to quantify the uncertainty of the bounding box detection in each frame. The complete filtering method is evaluated on camera trap images of the four large Swedish carnivores, bear, lynx, wolf, and wolverine. The experiments show that the class tracking formulation leads to a more robust classification.
Fusion framework and multimodality for the Laplacian approximation of Bayesian neural networks
Oct 12, 2023This paper considers the problem of sequential fusion of predictions from neural networks (NN) and fusion of predictions from multiple NN. This fusion strategy increases the robustness, i.e., reduces the impact of one incorrect classification and detection of outliers the \nn has not seen during training. This paper uses Laplacian approximation of Bayesian NNs (BNNs) to quantify the uncertainty necessary for fusion. Here, an extension is proposed such that the prediction of the NN can be represented by multimodal distributions. Regarding calibration of the estimated uncertainty in the prediction, the performance is significantly improved by having the flexibility to represent a multimodal distribution. Two class classical image classification tasks, i.e., MNIST and CFAR10, and image sequences from camera traps of carnivores in Swedish forests have been used to demonstrate the fusion strategies and proposed extension to the Laplacian approximation.
Using Received Power in Microphone Arrays to Estimate Direction of Arrival
May 04, 2023Conventional direction of arrival (DOA) estimators are based on array processing using either time differences or beamforming. The proposed approach is based on the received power at each microphone, which enables simple hardware, low sampling frequency and small arrays. The problem is recast into a linear regression framework where the least squares method applies, and the main drawback is that different sound sources are not readily separable. Our proposed approach is based on a training phase where the directional sensitivity of each microphone element is estimated. This model is then used as a fingerprint of the observed power vector in a real-time estimator. The learned power vector is here modeled by a Fourier series expansion, which enables Cram\'er-Rao lower bound computations. We demonstrate the performance using a circular array with eight microphones with promising results.
Uncertainty quantification in neural network classifiers -- a local linear approach
Mar 10, 2023Classifiers based on neural networks (NN) often lack a measure of uncertainty in the predicted class. We propose a method to estimate the probability mass function (PMF) of the different classes, as well as the covariance of the estimated PMF. First, a local linear approach is used during the training phase to recursively compute the covariance of the parameters in the NN. Secondly, in the classification phase another local linear approach is used to propagate the covariance of the learned NN parameters to the uncertainty in the output of the last layer of the NN. This allows for an efficient Monte Carlo (MC) approach for: (i) estimating the PMF; (ii) calculating the covariance of the estimated PMF; and (iii) proper risk assessment and fusion of multiple classifiers. Two classical image classification tasks, i.e., MNIST, and CFAR10, are used to demonstrate the efficiency the proposed method.
Track-To-Track Association For Fusion of Dimension-Reduced Estimates
Mar 01, 2023Network-centric multitarget tracking under communication constraints is considered, where dimension-reduced track estimates are exchanged. Earlier work on target tracking in a dimension-reduced configuration has focused on fusion aspects only and derived optimal ways of reducing dimensionality based on fusion performance. In this work we propose a novel problem formalization where estimates are reduced based on association performance. This problem is analyzed theoretically and problem properties are derived. The theoretical analysis leads to an optimization strategy that can be used to partly preserve association quality when reducing the dimensionality of communicated estimates. The applicability of the suggested optimization strategy is demonstrated numerically in a multitarget scenario.
Decentralized State Estimation In A Dimension-Reduced Linear Regression
Oct 13, 2022



Decentralized state estimation in a communication constrained sensor network is considered. To reduce the communication load only dimension-reduced estimates are exchanged between the networking agents. The considered dimension-reduction is restricted to be a linear mapping from a higher-dimensional space to a lower-dimensional space. The optimal, in the mean square error sense, linear mapping depends on the particular estimation method used. Several dimension-reducing algorithms are therefore proposed, where each algorithm corresponds to a commonly applied decentralized estimation method. All except one of the algorithms are shown to be optimal. For the remaining algorithm we provide a convergence analysis where it is theoretically shown that this algorithm converges to a stationary point and numerically shown that the convergence rate is fast. A message encoding solution is proposed that allows for efficient communication when using the proposed dimension-reduction techniques. Applicability of the different algorithms is illustrated by a numerical evaluation.
Asynchronous Averaging of Gait Cycles for Classification of Gait and Device Modes
Jul 05, 2019



An approach for computing unique gait signature using measurements collected from body-worn inertial measurement units (IMUs) is proposed. The gait signature represents one full cycle of the human gait, and is suitable for off-line or on-line classification of the gait mode. The signature can also be used to jointly classify the gait mode and the device mode. The device mode identifies how the IMU-equipped device is being carried by the user. The method is based on precise segmentation and resampling of the measured IMU signal, as an initial step, further tuned by minimizing the variability of the obtained signature within each gait cycle. Finally, a Fourier series expansion of the gait signature is introduced which provides a low-dimensional feature vector well suited for classification purposes. The proposed method is evaluated on a large dataset involving several subjects, each one containing two different gait modes and four different device modes. The gait signatures enable a high classification rate for each step cycle.