 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePMBM filter with partially grid-based birth model with applications in sensor management
Mar 19, 2021
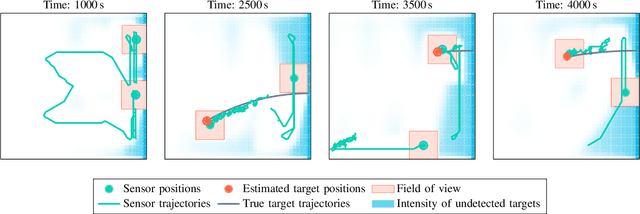

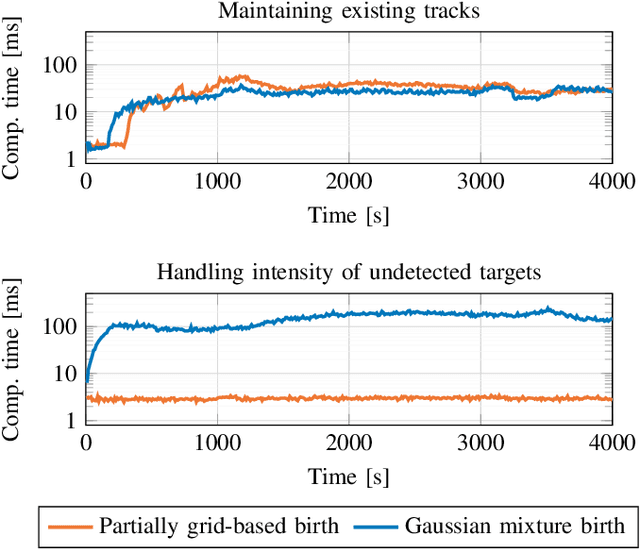
This paper introduces a Poisson multi-Bernoulli mixture (PMBM) filter in which the intensities of target birth and undetected targets are grid-based. A simplified version of the Rao-Blackwellized point mass filter is used to predict the intensity of undetected targets, and the density of targets detected for the first time are approximated as Gaussian. Whereas conventional PMBM filter implementations typically use Gaussian mixtures to model the intensity of undetected targets, the proposed representation allows the intensity to vary over the region of interest with sharp edges around the sensor's field of view, without using a large number of Gaussian mixture components. This reduces the computational complexity compared to the conventional approach. The proposed method is illustrated in a sensor management setting where trajectories of sensors with limited fields of view are controlled to search for and track the targets in a region of interest.