 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath tracking and stabilization for a reversing general 2-trailer configuration using a cascaded control approach
Paper and Code
Feb 22, 2016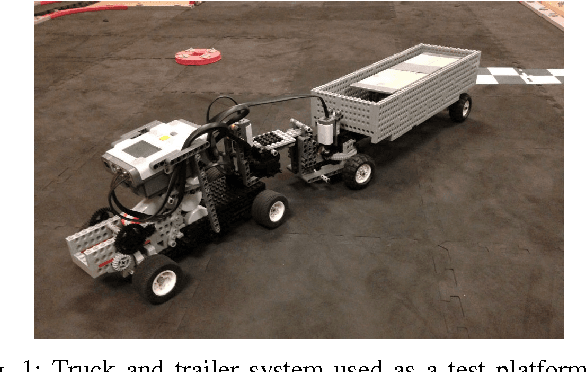
In this paper a cascaded approach for stabilization and path tracking of a general 2-trailer vehicle configuration with an off-axle hitching is presented. A low level Linear Quadratic controller is used for stabilization of the internal angles while a pure pursuit path tracking controller is used on a higher level to handle the path tracking. Piecewise linearity is the only requirement on the control reference which makes the design of reference paths very general. A Graphical User Interface is designed to make it easy for a user to design control references for complex manoeuvres given some representation of the surroundings. The approach is demonstrated with challenging path following scenarios both in simulation and on a small scale test platform.