 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation-aware model predictive path-following control for a general 2-trailer with a car-like tractor
Paper and Code
Mar 07, 2020
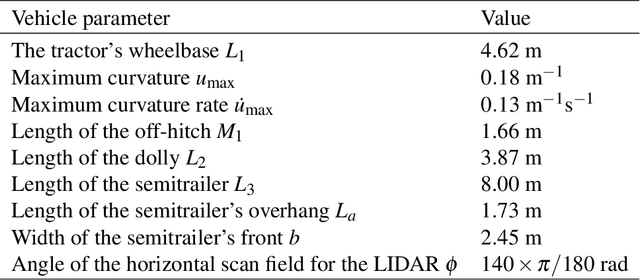
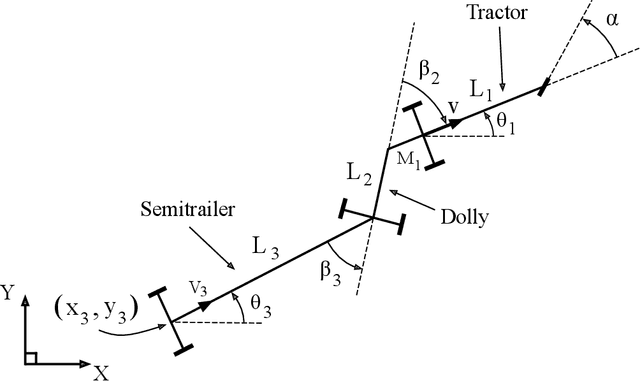
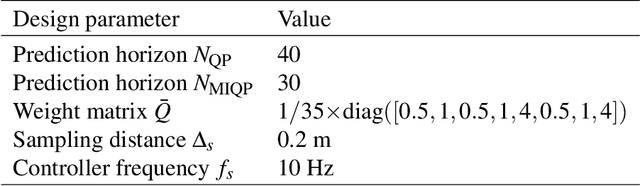
The design of the path-following controller is crucial for reliable autonomous vehicle operation. This design problem is especially challenging for a general 2-trailer with a car-like tractor due to the vehicle's unstable joint-angle kinematics in backward motion. Additionally, advanced sensors placed in the rear of the tractor have been proposed to solve the joint-angle estimation problem. Since these sensors typically have a limited field of view, the estimation solution introduces restrictions on the joint-angle configurations that can be estimated with high accuracy. To explicitly consider these constraints in the controller, a model predictive path-following control approach is proposed. Two approaches with different computation complexity and performance are presented. In the first approach, the joint-angle constraints are modeled as a union of convex polytopes, making it necessary to incorporate binary decision variables. The second approach avoids binary variables at the expense of a more conservative controller. In simulations and field experiments, the performance of the proposed path-following control approach is compared with a previously proposed control strategy.