 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization-based motion planning for multi-steered articulated vehicles
Dec 12, 2019
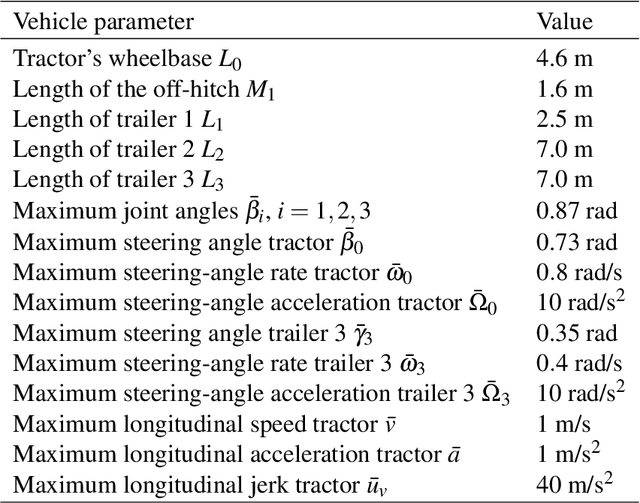
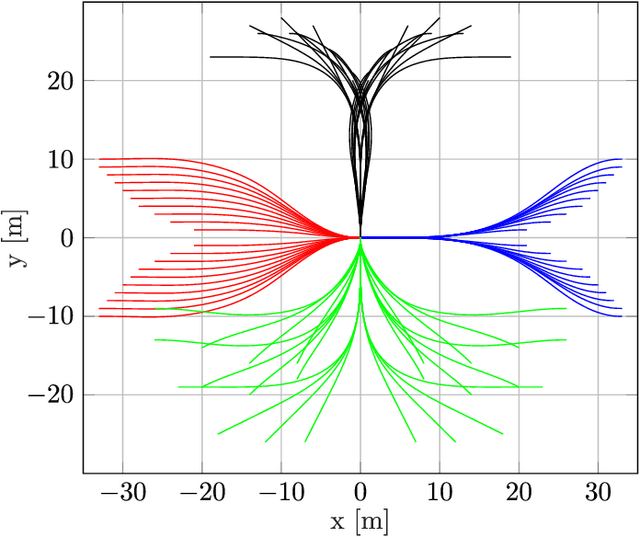

The task of maneuvering a multi-steered articulated vehicle in confined environments is difficult even for experienced drivers. In this work, we present an optimization-based trajectory planner targeting low-speed maneuvers in unstructured environments for multi-steered N-trailer vehicles, which are comprised of a car-like tractor and an arbitrary number of interconnected trailers with fixed or steerable wheels. The proposed trajectory planning framework is divided into two steps, where a lattice-based trajectory planner is used in a first step to compute a resolution optimal solution to a discretized version of the trajectory planning problem. The output from the lattice planner is then used in a second step to initialize an optimal control problem solver, which enables the framework to compute locally optimal trajectories that start at the vehicle's initial state and reaches the goal state exactly. The performance of the proposed optimization-based trajectory planner is evaluated in a set of practically relevant scenarios for a multi-steered 3-trailer vehicle with a car-like tractor where the last trailer is steerable.