 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Situational Awareness with V2X Communication and Set-membership Estimation
Feb 10, 2023



The ability to perceive and comprehend a traffic situation and to predict the intent of vehicles and road-users in the surrounding of the ego-vehicle is known as situational awareness. Situational awareness for a heavy-duty autonomous vehicle is a critical part of the automation platform and is dependent on the ego-vehicle's field-of-view. But when it comes to the urban scenario, the field-of-view of the ego-vehicle is likely to be affected by occlusion and blind spots caused by infrastructure, moving vehicles, and parked vehicles. This paper proposes a framework to improve situational awareness using set-membership estimation and vehicle-to-everything (V2X) communication. This framework provides safety guarantees and can adapt to dynamically changing scenarios, and is integrated into an existing complex autonomous platform. A detailed description of the framework implementation and real-time results are illustrated in this paper.
Set-Membership Estimation in Shared Situational Awareness for Automated Vehicles in Occluded Scenarios
Mar 02, 2021
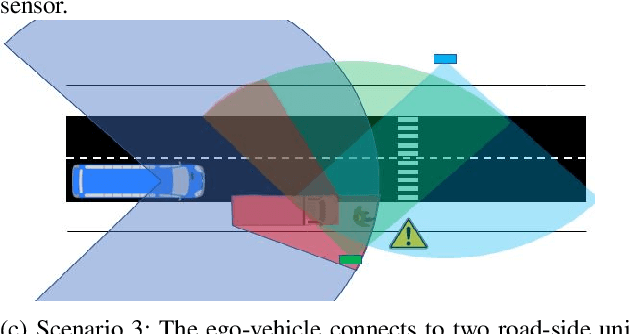
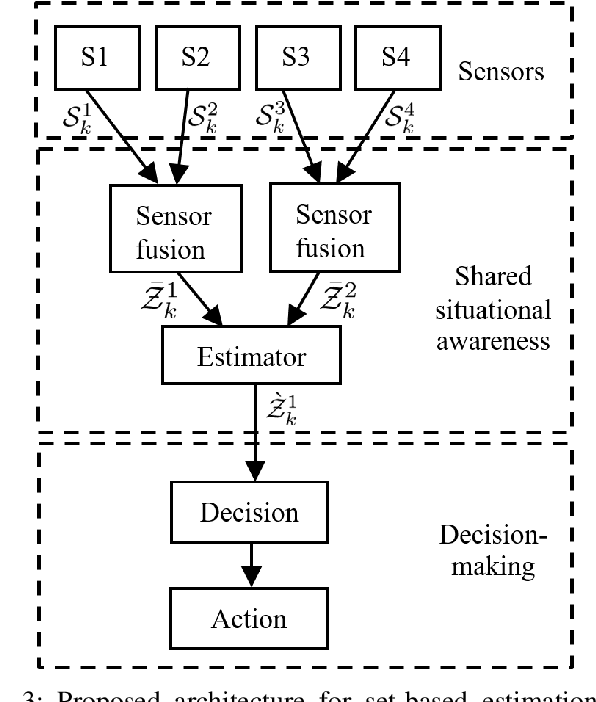
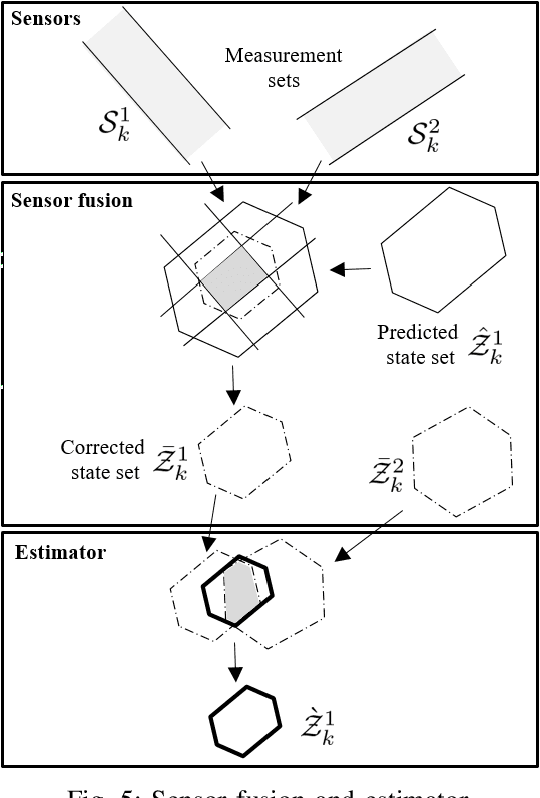
One of the main challenges in developing autonomous transport systems based on connected and automated vehicles is the comprehension and understanding of the environment around each vehicle. In many situations, the understanding is limited to the information gathered by the sensors mounted on the ego-vehicle, and it might be severely affected by occlusion caused by other vehicles or fixed obstacles along the road. Situational awareness is the ability to perceive and comprehend a traffic situation and to predict the intent of vehicles and road users in the surrounding of the ego-vehicle. The main objective of this paper is to propose a framework for how to automatically increase the situational awareness for an automatic bus in a realistic scenario when a pedestrian behind a parked truck might decide to walk across the road. Depending on the ego-vehicle's ability to fuse information from sensors in other vehicles or in the infrastructure, shared situational awareness is developed using a set-based estimation technique that provides robust guarantees for the location of the pedestrian. A two-level information fusion architecture is adopted, where sensor measurements are fused locally, and then the corresponding estimates are shared between vehicles and units in the infrastructure. Thanks to the provided safety guarantees, it is possible to appropriately adjust the ego-vehicle speed to maintain a proper safety margin. It is also argued that the framework is suitable for handling sensor failures and false detections in a systematic way. Three scenarios of growing information complexity are considered throughout the study. Simulations show how the increased situational awareness allows the ego-vehicle to maintain a reasonable speed without sacrificing safety.