 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Static Datasets: Robust Offline Policy Optimization via Vetted Synthetic Transitions
Jan 26, 2026Offline Reinforcement Learning (ORL) holds immense promise for safety-critical domains like industrial robotics, where real-time environmental interaction is often prohibitive. A primary obstacle in ORL remains the distributional shift between the static dataset and the learned policy, which typically mandates high degrees of conservatism that can restrain potential policy improvements. We present MoReBRAC, a model-based framework that addresses this limitation through Uncertainty-Aware latent synthesis. Instead of relying solely on the fixed data, MoReBRAC utilizes a dual-recurrent world model to synthesize high-fidelity transitions that augment the training manifold. To ensure the reliability of this synthetic data, we implement a hierarchical uncertainty pipeline integrating Variational Autoencoder (VAE) manifold detection, model sensitivity analysis, and Monte Carlo (MC) dropout. This multi-layered filtering process guarantees that only transitions residing within high-confidence regions of the learned dynamics are utilized. Our results on D4RL Gym-MuJoCo benchmarks reveal significant performance gains, particularly in ``random'' and ``suboptimal'' data regimes. We further provide insights into the role of the VAE as a geometric anchor and discuss the distributional trade-offs encountered when learning from near-optimal datasets.
Reach-Avoid Differential game with Reachability Analysis for UAVs: A decomposition approach
Dec 28, 2025Reach-avoid (RA) games have significant applications in security and defense, particularly for unmanned aerial vehicles (UAVs). These problems are inherently challenging due to the need to consider obstacles, consider the adversarial nature of opponents, ensure optimality, and account for nonlinear dynamics. Hamilton-Jacobi (HJ) reachability analysis has emerged as a powerful tool for tackling these challenges; however, while it has been applied to games involving two spatial dimensions, directly extending this approach to three spatial dimensions is impossible due to high dimensionality. On the other hand, alternative approaches for solving RA games lack the generality to consider games with three spatial dimensions involving agents with non-trivial system dynamics. In this work, we propose a novel framework for dimensionality reduction by decomposing the problem into a horizontal RA sub-game and a vertical RA sub-game. We then solve each sub-game using HJ reachability analysis and consider second-order dynamics that account for the defender's acceleration. To reconstruct the solution to the original RA game from the sub-games, we introduce a HJ-based tracking control algorithm in each sub-game that not only guarantees capture of the attacker but also tracking of the attacker thereafter. We prove the conditions under which the capture guarantees are maintained. The effectiveness of our approach is demonstrated via numerical simulations, showing that the decomposition maintains optimality and guarantees in the original problem. Our methods are also validated in a Gazebo physics simulator, achieving successful capture of quadrotors in three spatial dimensions space for the first time to the best of our knowledge.
Self-Supervised Masked Autoencoders with Dense-Unet for Coronary Calcium Removal in limited CT Data
Dec 25, 2025Coronary calcification creates blooming artifacts in Computed Tomography Angiography (CTA), severely hampering the diagnosis of lumen stenosis. While Deep Convolutional Neural Networks (DCNNs) like Dense-Unet have shown promise in removing these artifacts via inpainting, they often require large labeled datasets which are scarce in the medical domain. Inspired by recent advancements in Masked Autoencoders (MAE) for 3D point clouds, we propose \textbf{Dense-MAE}, a novel self-supervised learning framework for volumetric medical data. We introduce a pre-training strategy that randomly masks 3D patches of the vessel lumen and trains the Dense-Unet to reconstruct the missing geometry. This forces the encoder to learn high-level latent features of arterial topology without human annotation. Experimental results on clinical CTA datasets demonstrate that initializing the Calcium Removal network with our MAE-based weights significantly improves inpainting accuracy and stenosis estimation compared to training from scratch, specifically in few-shot scenarios.
Bayesian Optimization Parameter Tuning Framework for a Lyapunov Based Path Following Controller
Dec 14, 2025Parameter tuning in real-world experiments is constrained by the limited evaluation budget available on hardware. The path-following controller studied in this paper reflects a typical situation in nonlinear geometric controller, where multiple gains influence the dynamics through coupled nonlinear terms. Such interdependence makes manual tuning inefficient and unlikely to yield satisfactory performance within a practical number of trials. To address this challenge, we propose a Bayesian optimization (BO) framework that treats the closed-loop system as a black box and selects controller gains using a Gaussian-process surrogate. BO offers model-free exploration, quantified uncertainty, and data-efficient search, making it well suited for tuning tasks where each evaluation is costly. The framework is implemented on Honda's AI-Formula three-wheeled robot and assessed through repeated full-lap experiments on a fixed test track. The results show that BO improves controller performance within 32 trials, including 15 warm-start initial evaluations, indicating that it can efficiently locate high-performing regions of the parameter space under real-world conditions. These findings demonstrate that BO provides a practical, reliable, and data-efficient tuning approach for nonlinear path-following controllers on real robotic platforms.
Threshold Strategy for Leaking Corner-Free Hamilton-Jacobi Reachability with Decomposed Computations
May 15, 2025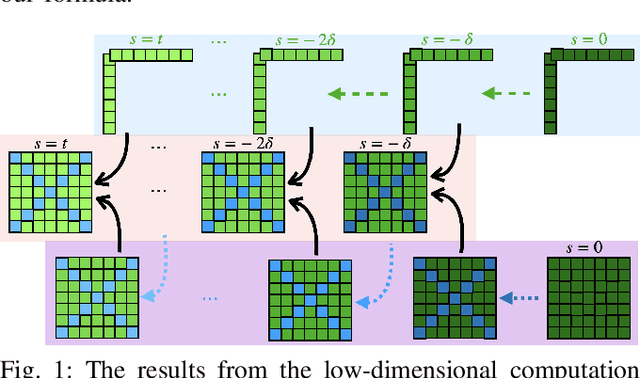
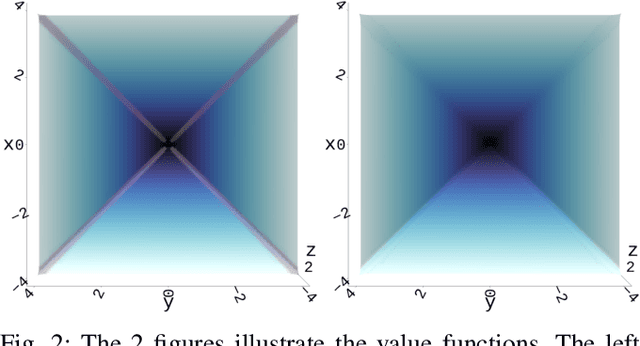
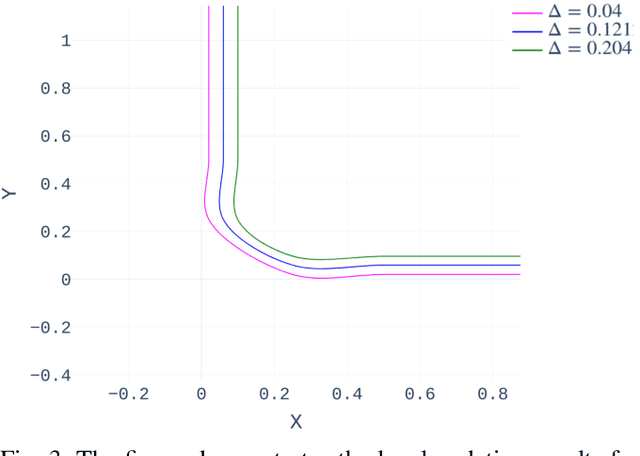
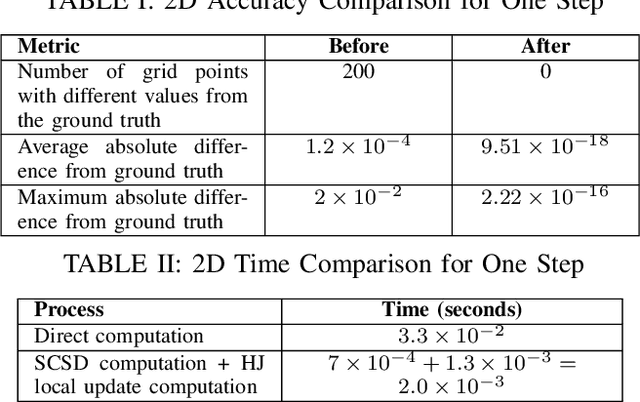
Hamilton-Jacobi (HJ) Reachability is widely used to compute value functions for states satisfying specific control objectives. However, it becomes intractable for high-dimensional problems due to the curse of dimensionality. Dimensionality reduction approaches are essential for mitigating this challenge, whereas they could introduce the ``leaking corner issue", leading to inaccuracies in the results. In this paper, we define the ``leaking corner issue" in terms of value functions, propose and prove a necessary condition for its occurrence. We then use these theoretical contributions to introduce a new local updating method that efficiently corrects inaccurate value functions while maintaining the computational efficiency of the dimensionality reduction approaches. We demonstrate the effectiveness of our method through numerical simulations. Although we validate our method with the self-contained subsystem decomposition (SCSD), our approach is applicable to other dimensionality reduction techniques that introduce the ``leaking corners".
Preserving Plasticity in Continual Learning with Adaptive Linearity Injection
May 14, 2025Loss of plasticity in deep neural networks is the gradual reduction in a model's capacity to incrementally learn and has been identified as a key obstacle to learning in non-stationary problem settings. Recent work has shown that deep linear networks tend to be resilient towards loss of plasticity. Motivated by this observation, we propose Adaptive Linearization (AdaLin), a general approach that dynamically adapts each neuron's activation function to mitigate plasticity loss. Unlike prior methods that rely on regularization or periodic resets, AdaLin equips every neuron with a learnable parameter and a gating mechanism that injects linearity into the activation function based on its gradient flow. This adaptive modulation ensures sufficient gradient signal and sustains continual learning without introducing additional hyperparameters or requiring explicit task boundaries. When used with conventional activation functions like ReLU, Tanh, and GeLU, we demonstrate that AdaLin can significantly improve performance on standard benchmarks, including Random Label and Permuted MNIST, Random Label and Shuffled CIFAR-10, and Class-Split CIFAR-100. Furthermore, its efficacy is shown in more complex scenarios, such as class-incremental learning on CIFAR-100 with a ResNet-18 backbone, and in mitigating plasticity loss in off-policy reinforcement learning agents. We perform a systematic set of ablations that show that neuron-level adaptation is crucial for good performance and analyze a number of metrics in the network that might be correlated to loss of plasticity.
HJRNO: Hamilton-Jacobi Reachability with Neural Operators
Apr 28, 2025Ensuring the safety of autonomous systems under uncertainty is a critical challenge. Hamilton-Jacobi reachability (HJR) analysis is a widely used method for guaranteeing safety under worst-case disturbances. Traditional HJR methods provide safety guarantees but suffer from the curse of dimensionality, limiting their scalability to high-dimensional systems or varying environmental conditions. In this work, we propose HJRNO, a neural operator-based framework for solving backward reachable tubes (BRTs) efficiently and accurately. By leveraging the Fourier Neural Operator (FNO), HJRNO learns a mapping between value functions, enabling fast inference with strong generalization across different obstacle shapes, system configurations, and hyperparameters. We demonstrate that HJRNO achieves low error on random obstacle scenarios and generalizes effectively across varying system dynamics. These results suggest that HJRNO offers a promising foundation model approach for scalable, real-time safety analysis in autonomous systems.
Unifying Model Predictive Path Integral Control, Reinforcement Learning, and Diffusion Models for Optimal Control and Planning
Feb 27, 2025
Model Predictive Path Integral (MPPI) control, Reinforcement Learning (RL), and Diffusion Models have each demonstrated strong performance in trajectory optimization, decision-making, and motion planning. However, these approaches have traditionally been treated as distinct methodologies with separate optimization frameworks. In this work, we establish a unified perspective that connects MPPI, RL, and Diffusion Models through gradient-based optimization on the Gibbs measure. We first show that MPPI can be interpreted as performing gradient ascent on a smoothed energy function. We then demonstrate that Policy Gradient methods reduce to MPPI when treating policy parameters as control variables under a fixed initial state. Additionally, we establish that the reverse sampling process in diffusion models follows the same update rule as MPPI.
Towards Fast and Safety-Guaranteed Trajectory Planning and Tracking for Time-Varying Systems
Dec 05, 2024When deploying autonomous systems in unknown and changing environments, it is critical that their motion planning and control algorithms are computationally efficient and can be reapplied online in real time, whilst providing theoretical safety guarantees in the presence of disturbances. The satisfaction of these objectives becomes more challenging when considering time-varying dynamics and disturbances, which arise in real-world contexts. We develop methods with the potential to address these issues by applying an offline-computed safety guaranteeing controller on a physical system, to track a virtual system that evolves through a trajectory that is replanned online, accounting for constraints updated online. The first method we propose is designed for general time-varying systems over a finite horizon. Our second method overcomes the finite horizon restriction for periodic systems. We simulate our algorithms on a case study of an autonomous underwater vehicle subject to wave disturbances.
TileTracker: Tracking Based Vector HD Mapping using Top-Down Road Images
Nov 04, 2024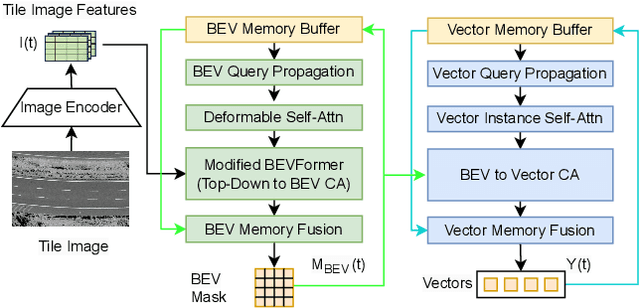
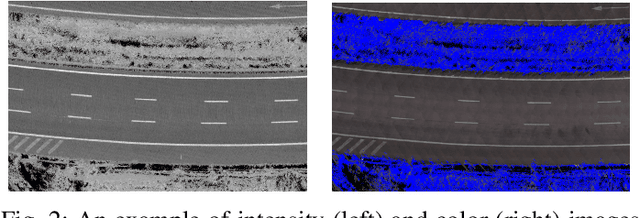
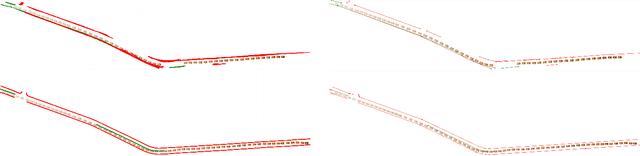
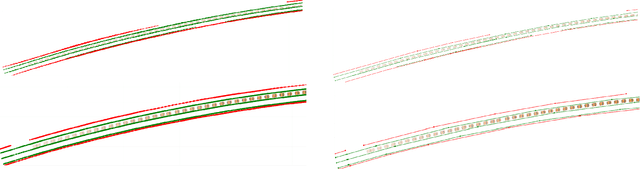
In this paper, we propose a tracking-based HD mapping algorithm for top-down road images, referred to as tile images. While HD maps traditionally rely on perspective camera images, our approach shows that tile images can also be effectively utilized, offering valuable contributions to this research area as it can be start of a new path in HD mapping algorithms. We modified the BEVFormer layers to generate BEV masks from tile images, which are then used by the model to generate divider and boundary lines. Our model was tested with both color and intensity images, and we present quantitative and qualitative results to demonstrate its performance.