 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRSLCPP -- Deterministic Simulations Using ROS 2
Jan 11, 2026Simulation is crucial in real-world robotics, offering safe, scalable, and efficient environments for developing applications, ranging from humanoid robots to autonomous vehicles and drones. While the Robot Operating System (ROS) has been widely adopted as the backbone of these robotic applications in both academia and industry, its asynchronous, multiprocess design complicates reproducibility, especially across varying hardware platforms. Deterministic callback execution cannot be guaranteed when computation times and communication delays vary. This lack of reproducibility complicates scientific benchmarking and continuous integration, where consistent results are essential. To address this, we present a methodology to create deterministic simulations using ROS 2 nodes. Our ROS Simulation Library for C++ (RSLCPP) implements this approach, enabling existing nodes to be combined into a simulation routine that yields reproducible results without requiring any code changes. We demonstrate that our approach yields identical results across various CPUs and architectures when testing both a synthetic benchmark and a real-world robotics system. RSLCPP is open-sourced at https://github.com/TUMFTM/rslcpp.
Longitudinal Control for Autonomous Racing with Combustion Engine Vehicles
Apr 24, 2025
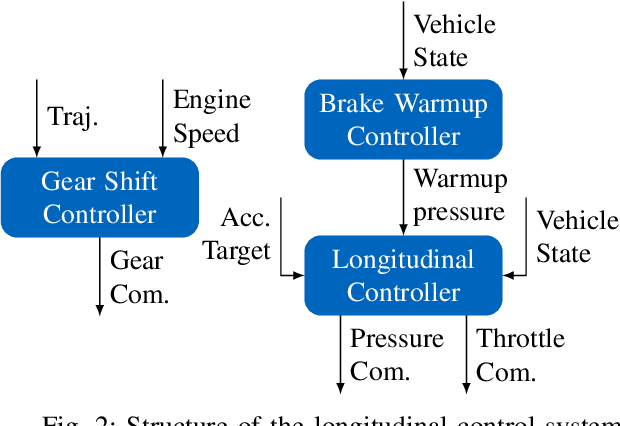
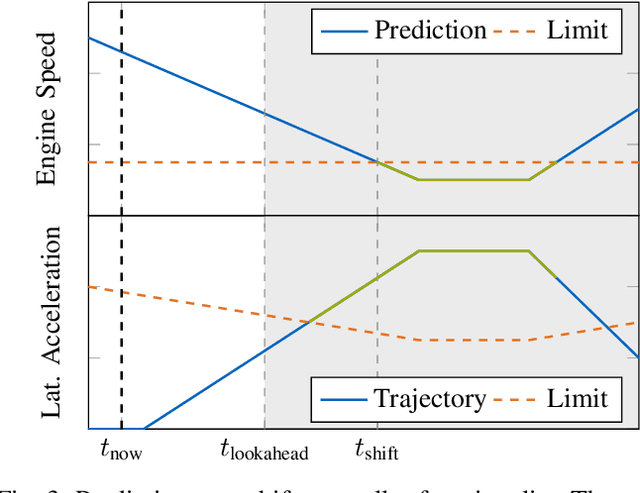
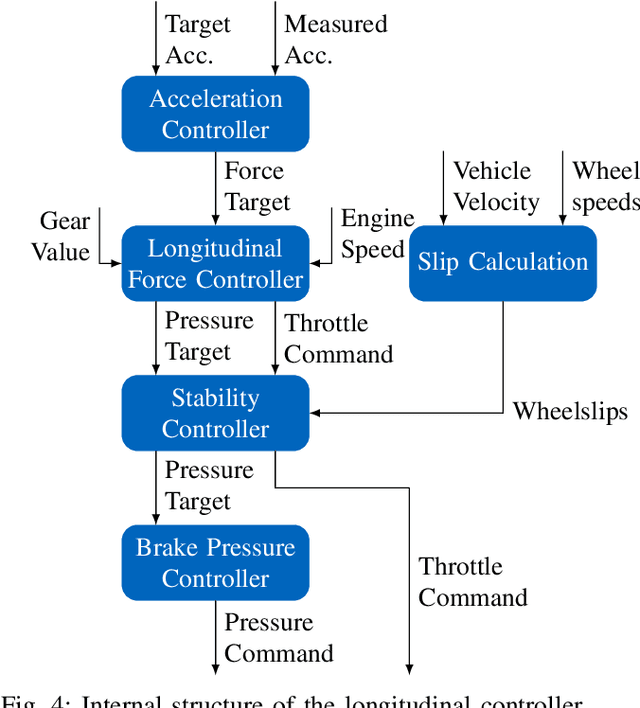
Usually, a controller for path- or trajectory tracking is employed in autonomous driving. Typically, these controllers generate high-level commands like longitudinal acceleration or force. However, vehicles with combustion engines expect different actuation inputs. This paper proposes a longitudinal control concept that translates high-level trajectory-tracking commands to the required low-level vehicle commands such as throttle, brake pressure and a desired gear. We chose a modular structure to easily integrate different trajectory-tracking control algorithms and vehicles. The proposed control concept enables a close tracking of the high-level control command. An anti-lock braking system, traction control, and brake warmup control also ensure a safe operation during real-world tests. We provide experimental validation of our concept using real world data with longitudinal accelerations reaching up to $25 \, \frac{\mathrm{m}}{\mathrm{s}^2}$. The experiments were conducted using the EAV24 racecar during the first event of the Abu Dhabi Autonomous Racing League on the Yas Marina Formula 1 Circuit.
Trajectory Planning using Reinforcement Learning for Interactive Overtaking Maneuvers in Autonomous Racing Scenarios
Apr 16, 2024



Conventional trajectory planning approaches for autonomous racing are based on the sequential execution of prediction of the opposing vehicles and subsequent trajectory planning for the ego vehicle. If the opposing vehicles do not react to the ego vehicle, they can be predicted accurately. However, if there is interaction between the vehicles, the prediction loses its validity. For high interaction, instead of a planning approach that reacts exclusively to the fixed prediction, a trajectory planning approach is required that incorporates the interaction with the opposing vehicles. This paper demonstrates the limitations of a widely used conventional sampling-based approach within a highly interactive blocking scenario. We show that high success rates are achieved for less aggressive blocking behavior but that the collision rate increases with more significant interaction. We further propose a novel Reinforcement Learning (RL)-based trajectory planning approach for racing that explicitly exploits the interaction with the opposing vehicle without requiring a prediction. In contrast to the conventional approach, the RL-based approach achieves high success rates even for aggressive blocking behavior. Furthermore, we propose a novel safety layer (SL) that intervenes when the trajectory generated by the RL-based approach is infeasible. In that event, the SL generates a sub-optimal but feasible trajectory, avoiding termination of the scenario due to a not found valid solution.