 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRSLCPP -- Deterministic Simulations Using ROS 2
Jan 11, 2026Simulation is crucial in real-world robotics, offering safe, scalable, and efficient environments for developing applications, ranging from humanoid robots to autonomous vehicles and drones. While the Robot Operating System (ROS) has been widely adopted as the backbone of these robotic applications in both academia and industry, its asynchronous, multiprocess design complicates reproducibility, especially across varying hardware platforms. Deterministic callback execution cannot be guaranteed when computation times and communication delays vary. This lack of reproducibility complicates scientific benchmarking and continuous integration, where consistent results are essential. To address this, we present a methodology to create deterministic simulations using ROS 2 nodes. Our ROS Simulation Library for C++ (RSLCPP) implements this approach, enabling existing nodes to be combined into a simulation routine that yields reproducible results without requiring any code changes. We demonstrate that our approach yields identical results across various CPUs and architectures when testing both a synthetic benchmark and a real-world robotics system. RSLCPP is open-sourced at https://github.com/TUMFTM/rslcpp.
Longitudinal Control for Autonomous Racing with Combustion Engine Vehicles
Apr 24, 2025
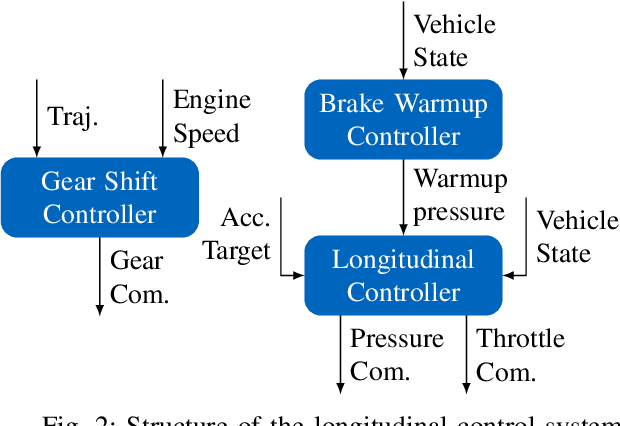
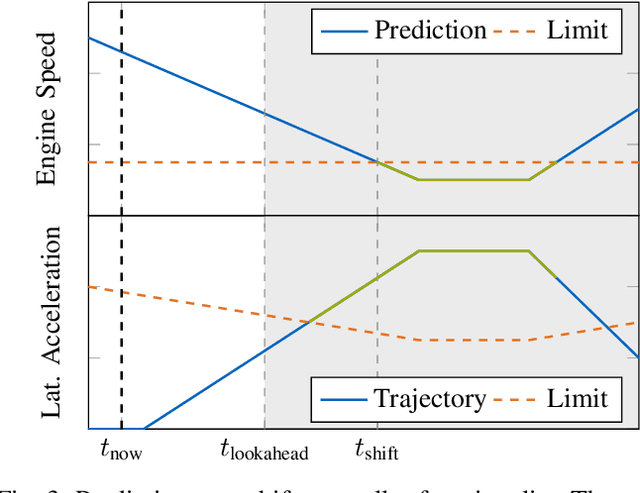
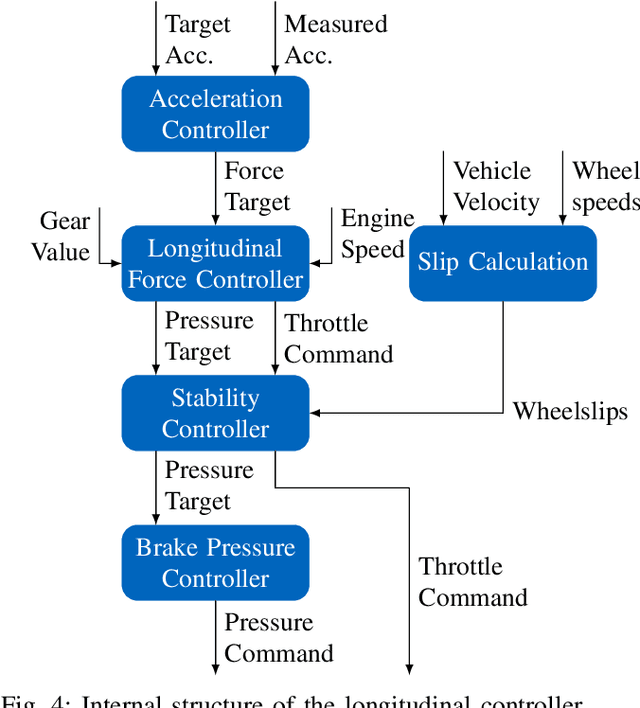
Usually, a controller for path- or trajectory tracking is employed in autonomous driving. Typically, these controllers generate high-level commands like longitudinal acceleration or force. However, vehicles with combustion engines expect different actuation inputs. This paper proposes a longitudinal control concept that translates high-level trajectory-tracking commands to the required low-level vehicle commands such as throttle, brake pressure and a desired gear. We chose a modular structure to easily integrate different trajectory-tracking control algorithms and vehicles. The proposed control concept enables a close tracking of the high-level control command. An anti-lock braking system, traction control, and brake warmup control also ensure a safe operation during real-world tests. We provide experimental validation of our concept using real world data with longitudinal accelerations reaching up to $25 \, \frac{\mathrm{m}}{\mathrm{s}^2}$. The experiments were conducted using the EAV24 racecar during the first event of the Abu Dhabi Autonomous Racing League on the Yas Marina Formula 1 Circuit.
Approaching Current Challenges in Developing a Software Stack for Fully Autonomous Driving
Apr 17, 2025Autonomous driving is a complex undertaking. A common approach is to break down the driving task into individual subtasks through modularization. These sub-modules are usually developed and published separately. However, if these individually developed algorithms have to be combined again to form a full-stack autonomous driving software, this poses particular challenges. Drawing upon our practical experience in developing the software of TUM Autonomous Motorsport, we have identified and derived these challenges in developing an autonomous driving software stack within a scientific environment. We do not focus on the specific challenges of individual algorithms but on the general difficulties that arise when deploying research algorithms on real-world test vehicles. To overcome these challenges, we introduce strategies that have been effective in our development approach. We additionally provide open-source implementations that enable these concepts on GitHub. As a result, this paper's contributions will simplify future full-stack autonomous driving projects, which are essential for a thorough evaluation of the individual algorithms.
A Quasi-Steady-State Black Box Simulation Approach for the Generation of g-g-g-v Diagrams
Apr 14, 2025The classical g-g diagram, representing the achievable acceleration space for a vehicle, is commonly used as a constraint in trajectory planning and control due to its computational simplicity. To address non-planar road geometries, this concept can be extended to incorporate g-g constraints as a function of vehicle speed and vertical acceleration, commonly referred to as g-g-g-v diagrams. However, the estimation of g-g-g-v diagrams is an open problem. Existing simulation-based approaches struggle to isolate non-transient, open-loop stable states across all combinations of speed and acceleration, while optimization-based methods often require simplified vehicle equations and have potential convergence issues. In this paper, we present a novel, open-source, quasi-steady-state black box simulation approach that applies a virtual inertial force in the longitudinal direction. The method emulates the load conditions associated with a specified longitudinal acceleration while maintaining constant vehicle speed, enabling open-loop steering ramps in a purely QSS manner. Appropriate regulation of the ramp steer rate inherently mitigates transient vehicle dynamics when determining the maximum feasible lateral acceleration. Moreover, treating the vehicle model as a black box eliminates model mismatch issues, allowing the use of high-fidelity or proprietary vehicle dynamics models typically unsuited for optimization approaches. An open-source version of the proposed method is available at: https://github.com/TUM-AVS/GGGVDiagrams
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023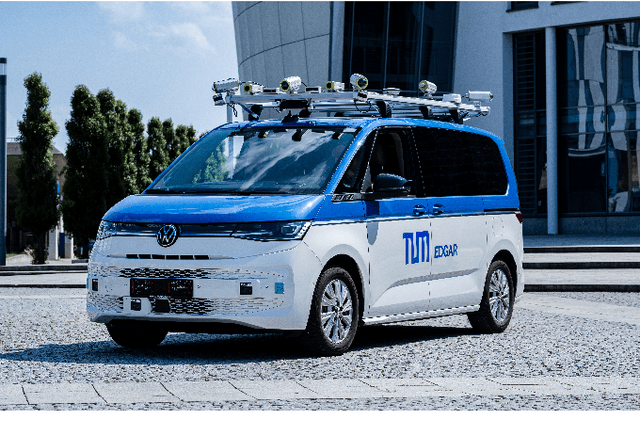
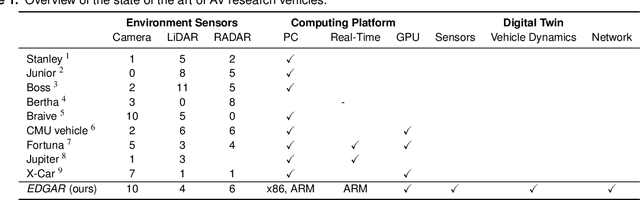

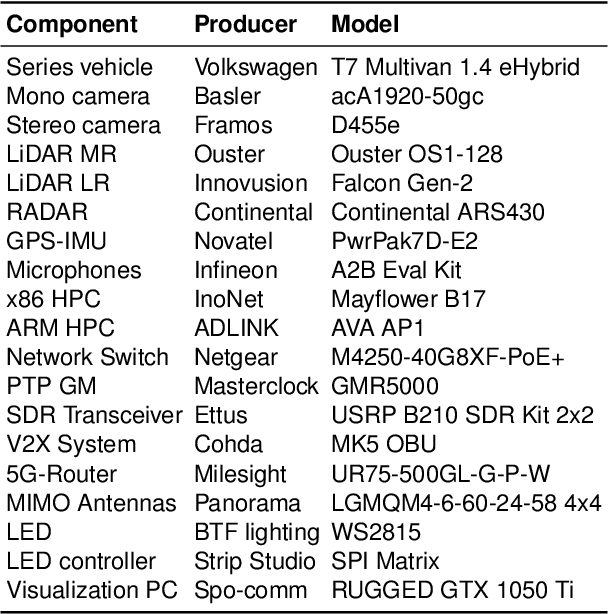
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.