 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Video-Action Joint Denoising for Dexterous Action and Data Generation
Jun 02, 2026Recent world action models leverage video foundation models by aligning broad visual-dynamics priors with executable robot actions. We revisit this alignment from a distributional perspective. Existing formulations typically narrow the aligned prior into an observation-conditioned policy distribution over future actions. In contrast, we keep the distribution broader by modeling the joint space of interaction videos and executable hand trajectories under multiple conditioning regimes. We propose Donk, a unified video-action denoising model for dexterous hands. With language, an initial image, and the initial hand state, Donk samples future videos and bimanual MANO trajectories as an action policy. Without the image condition, the same denoising architecture samples paired video-action rollouts from a text-conditioned distribution, turning the aligned video prior into a data engine. Across action, video, and text-only generation evaluations, Donk improves dexterous trajectory accuracy, preserves strong video fidelity, and produces smooth text-conditioned action rollouts under the same unified training recipe.
Benchmarking Empirical and Learning-Based Approaches for Feedforward Steering Control in Autonomous Racing
May 20, 2026Feedforward steering control is a key component of hierarchical control architectures for autonomous racing. The goal is to reduce steering corrections from the feedback controllers by predicting the vehicle's inverse lateral dynamics. This paper presents a systematic benchmark of two learning-based and two empirical (analytical) feedforward steering controllers. We introduce a new \acf{ehd} formulation based on a polynomial surface fit that captures velocity-dependent nonlinear steering behavior with minimal parametrization. We test the feedforward controllers in a high-fidelity simulation framework based on the real-world Abu Dhabi Autonomous Racing League competition, using a high-fidelity double-track vehicle dynamics simulator. Open-loop evaluation shows that the learning-based controllers achieve the lowest prediction errors; however, closed-loop testing reveals that this improved accuracy does not translate into superior path tracking performance or lap times, even after iterative fine-tuning. In contrast, the proposed EHD approach achieves the best overall closed-loop robustness and lap time, highlighting the necessity of evaluating feedforward strategies within the complete trajectory planning and control software stack. Our code is available at https://github.com/TUMRT/steering_ff_control.
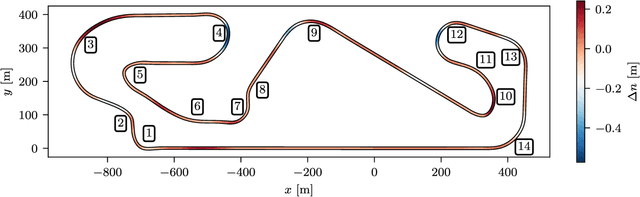
Trajectory Planning and Control near the Limits: an Open Experimental Benchmark on the RoboRacer Platform
May 19, 2026We present a modular framework to benchmark new and existing methods for trajectory planning and control in high-acceleration maneuvers that push autonomous driving to the limits. Our framework includes time-optimal raceline generation, online time-optimal velocity replanning, geometric path tracking controllers, and a new model-structured neural network (MS-NN) to learn the inverse dynamics for steering control. We deploy our framework on a 1:10-scale RoboRacer platform, using two circuits. Through several ablations with cautious and aggressive racelines, we study the performance of single modules and their combinations. We show that our MS-NN significantly improves tracking accuracy, decreases steering oscillations, and is physically interpretable. Moreover, online velocity replanning improves lap times by compensating for execution errors, and enables the vehicle to safely reach higher speeds and accelerations. To support future research, our code, datasets, videos and results are publicly available at https://roboracer-benchmark.github.io/planning_control_benchmark/.
StyleVLA: Driving Style-Aware Vision Language Action Model for Autonomous Driving
Mar 10, 2026Vision Language Models (VLMs) bridge visual perception and linguistic reasoning. In Autonomous Driving (AD), this synergy has enabled Vision Language Action (VLA) models, which translate high-level multimodal understanding into driving behaviors, typically represented as future trajectories. However, existing VLA models mainly generate generic collision-free trajectories. Beyond collision avoidance, adapting to diverse driving styles (e.g., sporty, comfortable) is essential for personalized driving. Moreover, many methods treat trajectory generation as naive token prediction, which can produce kinematically infeasible actions. To address these limitations, we present StyleVLA, a physics-informed VLA framework for generating diverse and physically plausible driving behaviors. We introduce a hybrid loss that combines a kinematic consistency constraint with a continuous regression head to improve trajectory feasibility. To train StyleVLA, built on Qwen3-VL-4B, we construct a large-scale instruction dataset with over 1.2k scenarios, 76k Bird's Eye View (BEV) samples, and 42k First Person View (FPV) samples, with ground-truth trajectories for five driving styles and natural-language instructions. Experiments show that our 4B-parameter StyleVLA significantly outperforms proprietary models (e.g., Gemini-3-Pro) and state-of-the-art VLA models. Using a composite driving score measuring success rate, physical feasibility, and style adherence, StyleVLA achieves 0.55 on BEV and 0.51 on FPV, versus 0.32 and 0.35 for Gemini-3-Pro. These results show that a specialized, physics-informed, lightweight model can surpass closed-source models on domain-specific tasks.
Enhancing Physical Consistency in Lightweight World Models
Sep 15, 2025A major challenge in deploying world models is the trade-off between size and performance. Large world models can capture rich physical dynamics but require massive computing resources, making them impractical for edge devices. Small world models are easier to deploy but often struggle to learn accurate physics, leading to poor predictions. We propose the Physics-Informed BEV World Model (PIWM), a compact model designed to efficiently capture physical interactions in bird's-eye-view (BEV) representations. PIWM uses Soft Mask during training to improve dynamic object modeling and future prediction. We also introduce a simple yet effective technique, Warm Start, for inference to enhance prediction quality with a zero-shot model. Experiments show that at the same parameter scale (400M), PIWM surpasses the baseline by 60.6% in weighted overall score. Moreover, even when compared with the largest baseline model (400M), the smallest PIWM (130M Soft Mask) achieves a 7.4% higher weighted overall score with a 28% faster inference speed.
Model-Structured Neural Networks to Control the Steering Dynamics of Autonomous Race Cars
Jul 27, 2025Autonomous racing has gained increasing attention in recent years, as a safe environment to accelerate the development of motion planning and control methods for autonomous driving. Deep learning models, predominantly based on neural networks (NNs), have demonstrated significant potential in modeling the vehicle dynamics and in performing various tasks in autonomous driving. However, their black-box nature is critical in the context of autonomous racing, where safety and robustness demand a thorough understanding of the decision-making algorithms. To address this challenge, this paper proposes MS-NN-steer, a new Model-Structured Neural Network for vehicle steering control, integrating the prior knowledge of the nonlinear vehicle dynamics into the neural architecture. The proposed controller is validated using real-world data from the Abu Dhabi Autonomous Racing League (A2RL) competition, with full-scale autonomous race cars. In comparison with general-purpose NNs, MS-NN-steer is shown to achieve better accuracy and generalization with small training datasets, while being less sensitive to the weights' initialization. Also, MS-NN-steer outperforms the steering controller used by the A2RL winning team. Our implementation is available open-source in a GitHub repository.
Foundation Models in Autonomous Driving: A Survey on Scenario Generation and Scenario Analysis
Jun 13, 2025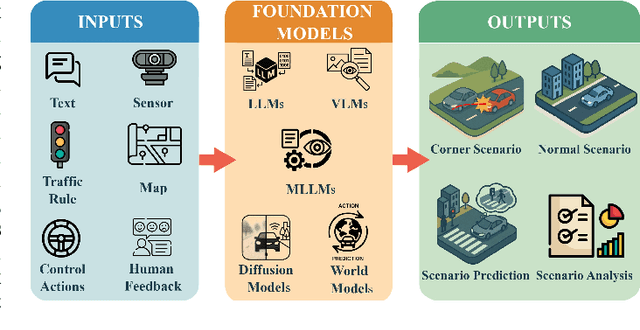
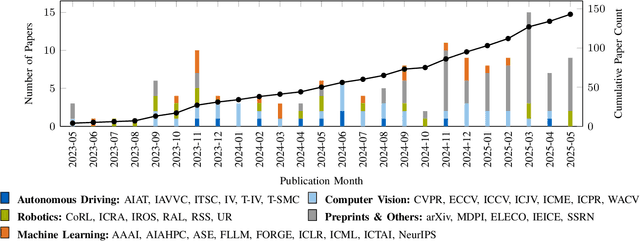
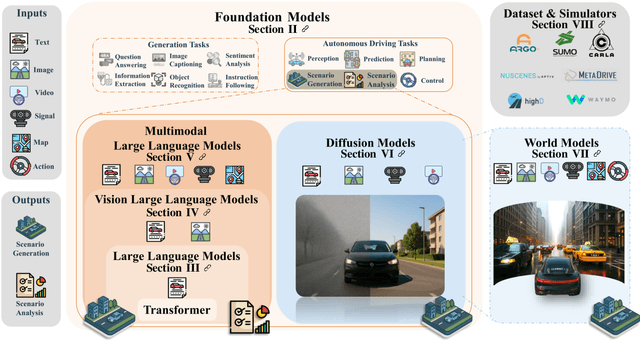
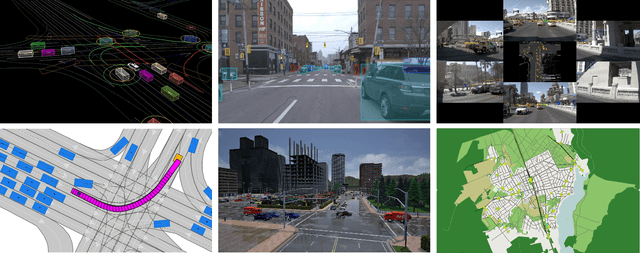
For autonomous vehicles, safe navigation in complex environments depends on handling a broad range of diverse and rare driving scenarios. Simulation- and scenario-based testing have emerged as key approaches to development and validation of autonomous driving systems. Traditional scenario generation relies on rule-based systems, knowledge-driven models, and data-driven synthesis, often producing limited diversity and unrealistic safety-critical cases. With the emergence of foundation models, which represent a new generation of pre-trained, general-purpose AI models, developers can process heterogeneous inputs (e.g., natural language, sensor data, HD maps, and control actions), enabling the synthesis and interpretation of complex driving scenarios. In this paper, we conduct a survey about the application of foundation models for scenario generation and scenario analysis in autonomous driving (as of May 2025). Our survey presents a unified taxonomy that includes large language models, vision-language models, multimodal large language models, diffusion models, and world models for the generation and analysis of autonomous driving scenarios. In addition, we review the methodologies, open-source datasets, simulation platforms, and benchmark challenges, and we examine the evaluation metrics tailored explicitly to scenario generation and analysis. Finally, the survey concludes by highlighting the open challenges and research questions, and outlining promising future research directions. All reviewed papers are listed in a continuously maintained repository, which contains supplementary materials and is available at https://github.com/TUM-AVS/FM-for-Scenario-Generation-Analysis.
Biasing the Driving Style of an Artificial Race Driver for Online Time-Optimal Maneuver Planning
Apr 17, 2025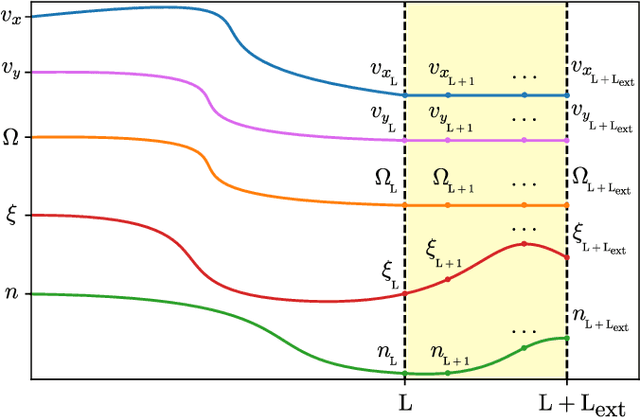
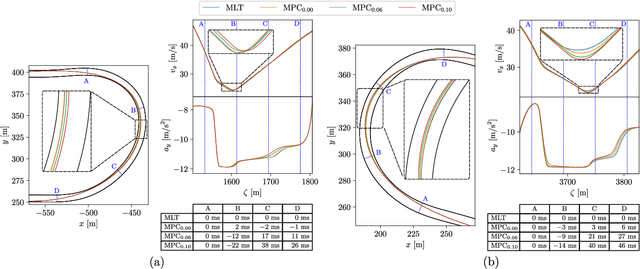
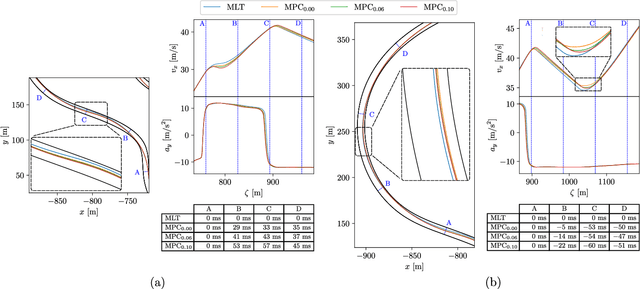
In this work, we present a novel approach to bias the driving style of an artificial race driver (ARD) for online time-optimal trajectory planning. Our method leverages a nonlinear model predictive control (MPC) framework that combines time minimization with exit speed maximization at the end of the planning horizon. We introduce a new MPC terminal cost formulation based on the trajectory planned in the previous MPC step, enabling ARD to adapt its driving style from early to late apex maneuvers in real-time. Our approach is computationally efficient, allowing for low replan times and long planning horizons. We validate our method through simulations, comparing the results against offline minimum-lap-time (MLT) optimal control and online minimum-time MPC solutions. The results demonstrate that our new terminal cost enables ARD to bias its driving style, and achieve online lap times close to the MLT solution and faster than the minimum-time MPC solution. Our approach paves the way for a better understanding of the reasons behind human drivers' choice of early or late apex maneuvers.
A Quasi-Steady-State Black Box Simulation Approach for the Generation of g-g-g-v Diagrams
Apr 14, 2025



The classical g-g diagram, representing the achievable acceleration space for a vehicle, is commonly used as a constraint in trajectory planning and control due to its computational simplicity. To address non-planar road geometries, this concept can be extended to incorporate g-g constraints as a function of vehicle speed and vertical acceleration, commonly referred to as g-g-g-v diagrams. However, the estimation of g-g-g-v diagrams is an open problem. Existing simulation-based approaches struggle to isolate non-transient, open-loop stable states across all combinations of speed and acceleration, while optimization-based methods often require simplified vehicle equations and have potential convergence issues. In this paper, we present a novel, open-source, quasi-steady-state black box simulation approach that applies a virtual inertial force in the longitudinal direction. The method emulates the load conditions associated with a specified longitudinal acceleration while maintaining constant vehicle speed, enabling open-loop steering ramps in a purely QSS manner. Appropriate regulation of the ramp steer rate inherently mitigates transient vehicle dynamics when determining the maximum feasible lateral acceleration. Moreover, treating the vehicle model as a black box eliminates model mismatch issues, allowing the use of high-fidelity or proprietary vehicle dynamics models typically unsuited for optimization approaches. An open-source version of the proposed method is available at: https://github.com/TUM-AVS/GGGVDiagrams
Kineto-Dynamical Planning and Accurate Execution of Minimum-Time Maneuvers on Three-Dimensional Circuits
Feb 05, 2025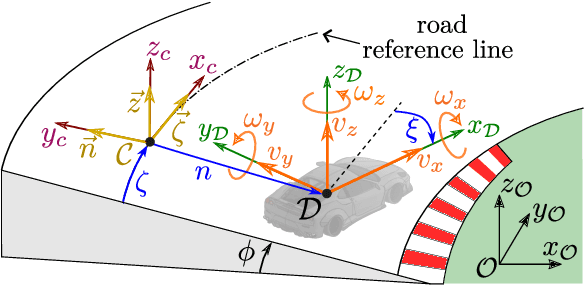
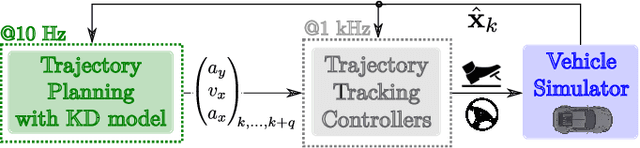
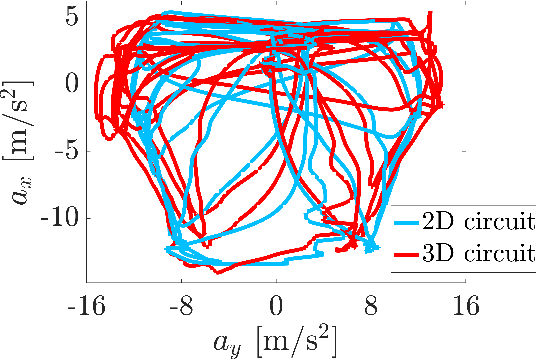
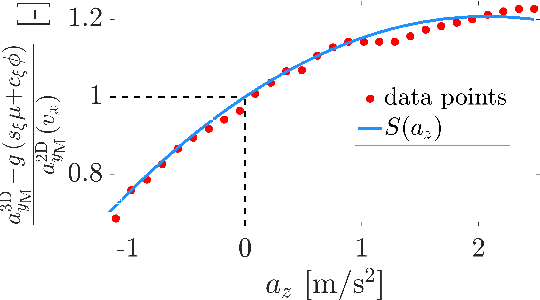
Online planning and execution of minimum-time maneuvers on three-dimensional (3D) circuits is an open challenge in autonomous vehicle racing. In this paper, we present an artificial race driver (ARD) to learn the vehicle dynamics, plan and execute minimum-time maneuvers on a 3D track. ARD integrates a novel kineto-dynamical (KD) vehicle model for trajectory planning with economic nonlinear model predictive control (E-NMPC). We use a high-fidelity vehicle simulator (VS) to compare the closed-loop ARD results with a minimum-lap-time optimal control problem (MLT-VS), solved offline with the same VS. Our ARD sets lap times close to the MLT-VS, and the new KD model outperforms a literature benchmark. Finally, we study the vehicle trajectories, to assess the re-planning capabilities of ARD under execution errors. A video with the main results is available as supplementary material.