 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisengagement Analysis and Field Tests of a Prototypical Open-Source Level 4 Autonomous Driving System
Mar 23, 2026Proprietary Autonomous Driving Systems are typically evaluated through disengagements, unplanned manual interventions to alter vehicle behavior, as annually reported by the California Department of Motor Vehicles. However, the real-world capabilities of prototypical open-source Level 4 vehicles over substantial distances remain largely unexplored. This study evaluates a research vehicle running an Autoware-based software stack across 236 km of mixed traffic. By classifying 30 disengagements across 26 rides with a novel five-level criticality framework, we observed a spatial disengagement rate of 0.127 1/km. Interventions predominantly occurred at lower speeds near static objects and traffic lights. Perception and Planning failures accounted for 40% and 26.7% of disengagements, respectively, largely due to object-tracking losses and operational deadlocks caused by parked vehicles. Frequent, unnecessary interventions highlighted a lack of trust on the part of the safety driver. These results show that while open-source software enables extensive operations, disengagement analysis is vital for uncovering robustness issues missed by standard metrics.
StyleVLA: Driving Style-Aware Vision Language Action Model for Autonomous Driving
Mar 10, 2026Vision Language Models (VLMs) bridge visual perception and linguistic reasoning. In Autonomous Driving (AD), this synergy has enabled Vision Language Action (VLA) models, which translate high-level multimodal understanding into driving behaviors, typically represented as future trajectories. However, existing VLA models mainly generate generic collision-free trajectories. Beyond collision avoidance, adapting to diverse driving styles (e.g., sporty, comfortable) is essential for personalized driving. Moreover, many methods treat trajectory generation as naive token prediction, which can produce kinematically infeasible actions. To address these limitations, we present StyleVLA, a physics-informed VLA framework for generating diverse and physically plausible driving behaviors. We introduce a hybrid loss that combines a kinematic consistency constraint with a continuous regression head to improve trajectory feasibility. To train StyleVLA, built on Qwen3-VL-4B, we construct a large-scale instruction dataset with over 1.2k scenarios, 76k Bird's Eye View (BEV) samples, and 42k First Person View (FPV) samples, with ground-truth trajectories for five driving styles and natural-language instructions. Experiments show that our 4B-parameter StyleVLA significantly outperforms proprietary models (e.g., Gemini-3-Pro) and state-of-the-art VLA models. Using a composite driving score measuring success rate, physical feasibility, and style adherence, StyleVLA achieves 0.55 on BEV and 0.51 on FPV, versus 0.32 and 0.35 for Gemini-3-Pro. These results show that a specialized, physics-informed, lightweight model can surpass closed-source models on domain-specific tasks.
Modular Autonomy with Conversational Interaction: An LLM-driven Framework for Decision Making in Autonomous Driving
Jan 09, 2026Recent advancements in Large Language Models (LLMs) offer new opportunities to create natural language interfaces for Autonomous Driving Systems (ADSs), moving beyond rigid inputs. This paper addresses the challenge of mapping the complexity of human language to the structured action space of modular ADS software. We propose a framework that integrates an LLM-based interaction layer with Autoware, a widely used open-source software. This system enables passengers to issue high-level commands, from querying status information to modifying driving behavior. Our methodology is grounded in three key components: a taxonomization of interaction categories, an application-centric Domain Specific Language (DSL) for command translation, and a safety-preserving validation layer. A two-stage LLM architecture ensures high transparency by providing feedback based on the definitive execution status. Evaluation confirms the system's timing efficiency and translation robustness. Simulation successfully validated command execution across all five interaction categories. This work provides a foundation for extensible, DSL-assisted interaction in modular and safety-conscious autonomy stacks.
Towards Safe Autonomous Driving: A Real-Time Safeguarding Concept for Motion Planning Algorithms
Jul 10, 2025Ensuring the functional safety of motion planning modules in autonomous vehicles remains a critical challenge, especially when dealing with complex or learning-based software. Online verification has emerged as a promising approach to monitor such systems at runtime, yet its integration into embedded real-time environments remains limited. This work presents a safeguarding concept for motion planning that extends prior approaches by introducing a time safeguard. While existing methods focus on geometric and dynamic feasibility, our approach additionally monitors the temporal consistency of planning outputs to ensure timely system response. A prototypical implementation on a real-time operating system evaluates trajectory candidates using constraint-based feasibility checks and cost-based plausibility metrics. Preliminary results show that the safeguarding module operates within real-time bounds and effectively detects unsafe trajectories. However, the full integration of the time safeguard logic and fallback strategies is ongoing. This study contributes a modular and extensible framework for runtime trajectory verification and highlights key aspects for deployment on automotive-grade hardware. Future work includes completing the safeguarding logic and validating its effectiveness through hardware-in-the-loop simulations and vehicle-based testing. The code is available at: https://github.com/TUM-AVS/motion-planning-supervisor
Foundation Models in Autonomous Driving: A Survey on Scenario Generation and Scenario Analysis
Jun 13, 2025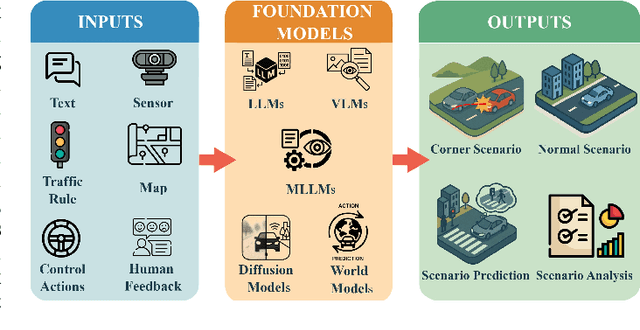
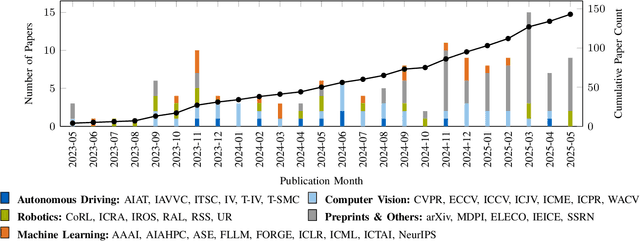
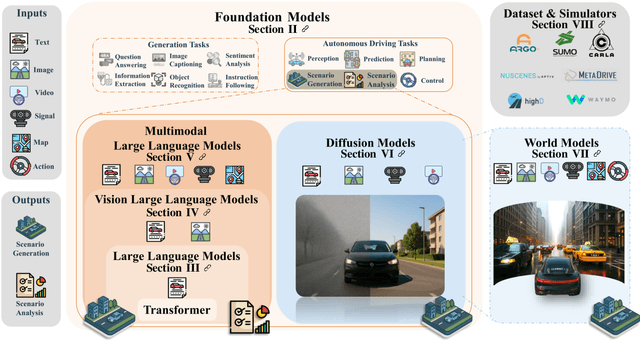
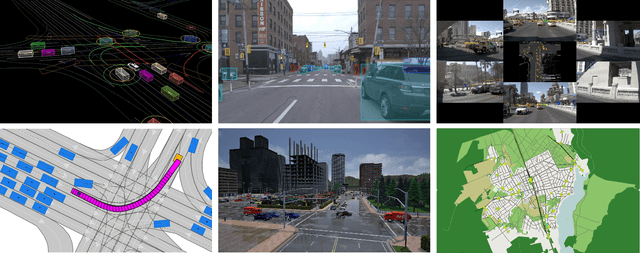
For autonomous vehicles, safe navigation in complex environments depends on handling a broad range of diverse and rare driving scenarios. Simulation- and scenario-based testing have emerged as key approaches to development and validation of autonomous driving systems. Traditional scenario generation relies on rule-based systems, knowledge-driven models, and data-driven synthesis, often producing limited diversity and unrealistic safety-critical cases. With the emergence of foundation models, which represent a new generation of pre-trained, general-purpose AI models, developers can process heterogeneous inputs (e.g., natural language, sensor data, HD maps, and control actions), enabling the synthesis and interpretation of complex driving scenarios. In this paper, we conduct a survey about the application of foundation models for scenario generation and scenario analysis in autonomous driving (as of May 2025). Our survey presents a unified taxonomy that includes large language models, vision-language models, multimodal large language models, diffusion models, and world models for the generation and analysis of autonomous driving scenarios. In addition, we review the methodologies, open-source datasets, simulation platforms, and benchmark challenges, and we examine the evaluation metrics tailored explicitly to scenario generation and analysis. Finally, the survey concludes by highlighting the open challenges and research questions, and outlining promising future research directions. All reviewed papers are listed in a continuously maintained repository, which contains supplementary materials and is available at https://github.com/TUM-AVS/FM-for-Scenario-Generation-Analysis.
MultiDrive: A Co-Simulation Framework Bridging 2D and 3D Driving Simulation for AV Software Validation
May 20, 2025Scenario-based testing using simulations is a cornerstone of Autonomous Vehicles (AVs) software validation. So far, developers needed to choose between low-fidelity 2D simulators to explore the scenario space efficiently, and high-fidelity 3D simulators to study relevant scenarios in more detail, thus reducing testing costs while mitigating the sim-to-real gap. This paper presents a novel framework that leverages multi-agent co-simulation and procedural scenario generation to support scenario-based testing across low- and high-fidelity simulators for the development of motion planning algorithms. Our framework limits the effort required to transition scenarios between simulators and automates experiment execution, trajectory analysis, and visualization. Experiments with a reference motion planner show that our framework uncovers discrepancies between the planner's intended and actual behavior, thus exposing weaknesses in planning assumptions under more realistic conditions. Our framework is available at: https://github.com/TUM-AVS/MultiDrive
Pedestrian-Aware Motion Planning for Autonomous Driving in Complex Urban Scenarios
Apr 02, 2025



Motion planning in uncertain environments like complex urban areas is a key challenge for autonomous vehicles (AVs). The aim of our research is to investigate how AVs can navigate crowded, unpredictable scenarios with multiple pedestrians while maintaining a safe and efficient vehicle behavior. So far, most research has concentrated on static or deterministic traffic participant behavior. This paper introduces a novel algorithm for motion planning in crowded spaces by combining social force principles for simulating realistic pedestrian behavior with a risk-aware motion planner. We evaluate this new algorithm in a 2D simulation environment to rigorously assess AV-pedestrian interactions, demonstrating that our algorithm enables safe, efficient, and adaptive motion planning, particularly in highly crowded urban environments - a first in achieving this level of performance. This study has not taken into consideration real-time constraints and has been shown only in simulation so far. Further studies are needed to investigate the novel algorithm in a complete software stack for AVs on real cars to investigate the entire perception, planning and control pipeline in crowded scenarios. We release the code developed in this research as an open-source resource for further studies and development. It can be accessed at the following link: https://github.com/TUM-AVS/PedestrianAwareMotionPlanning
From Shadows to Safety: Occlusion Tracking and Risk Mitigation for Urban Autonomous Driving
Apr 02, 2025



Autonomous vehicles (AVs) must navigate dynamic urban environments where occlusions and perception limitations introduce significant uncertainties. This research builds upon and extends existing approaches in risk-aware motion planning and occlusion tracking to address these challenges. While prior studies have developed individual methods for occlusion tracking and risk assessment, a comprehensive method integrating these techniques has not been fully explored. We, therefore, enhance a phantom agent-centric model by incorporating sequential reasoning to track occluded areas and predict potential hazards. Our model enables realistic scenario representation and context-aware risk evaluation by modeling diverse phantom agents, each with distinct behavior profiles. Simulations demonstrate that the proposed approach improves situational awareness and balances proactive safety with efficient traffic flow. While these results underline the potential of our method, validation in real-world scenarios is necessary to confirm its feasibility and generalizability. By utilizing and advancing established methodologies, this work contributes to safer and more reliable AV planning in complex urban environments. To support further research, our method is available as open-source software at: https://github.com/TUM-AVS/OcclusionAwareMotionPlanning
Frenetix Motion Planner: High-Performance and Modular Trajectory Planning Algorithm for Complex Autonomous Driving Scenarios
Feb 02, 2024Our work aims to present a high-performance and modular sampling-based trajectory planning algorithm for autonomous vehicles. This algorithm is tailored to address the complex challenges in solution space construction and optimization problem formulation within the path planning domain. Our method employs a multi-objective optimization strategy for efficient navigation in static and highly dynamic environments, focusing on optimizing trajectory comfort, safety, and path precision. This algorithm was then used to analyze the algorithm performance and success rate in 1750 virtual complex urban and highway scenarios. Our results demonstrate fast calculation times (8ms for 800 trajectories), a high success rate in complex scenarios (88%), and easy adaptability with different modules presented. The most noticeable difference exhibited was the fast trajectory sampling, feasibility check, and cost evaluation step across various trajectory counts. While our study presents promising results, it's important to note that our assessments have been conducted exclusively in simulated environments, and real-world testing is required to fully validate our findings. The code and the additional modules used in this research are publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-Motion-Planner.
Overcoming Blind Spots: Occlusion Considerations for Improved Autonomous Driving Safety
Feb 02, 2024Our work introduces a module for assessing the trajectory safety of autonomous vehicles in dynamic environments marked by high uncertainty. We focus on occluded areas and occluded traffic participants with limited information about surrounding obstacles. To address this problem, we propose a software module that handles blind spots (BS) created by static and dynamic obstacles in urban environments. We identify potential occluded traffic participants, predict their movement, and assess the ego vehicle's trajectory using various criticality metrics. The method offers a straightforward and modular integration into motion planner algorithms. We present critical real-world scenarios to evaluate our module and apply our approach to a publicly available trajectory planning algorithm. Our results demonstrate that safe yet efficient driving with occluded road users can be achieved by incorporating safety assessments into the planning process. The code used in this research is publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-Occlusion.