 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating Driving Interactions: A Robust Multi-Agent Simulation Framework for Autonomous Vehicles
Feb 07, 2024Current validation methods often rely on recorded data and basic functional checks, which may not be sufficient to encompass the scenarios an autonomous vehicle might encounter. In addition, there is a growing need for complex scenarios with changing vehicle interactions for comprehensive validation. This work introduces a novel synchronous multi-agent simulation framework for autonomous vehicles in interactive scenarios. Our approach creates an interactive scenario and incorporates publicly available edge-case scenarios wherein simulated vehicles are replaced by agents navigating to predefined destinations. We provide a platform that enables the integration of different autonomous driving planning methodologies and includes a set of evaluation metrics to assess autonomous driving behavior. Our study explores different planning setups and adjusts simulation complexity to test the framework's adaptability and performance. Results highlight the critical role of simulating vehicle interactions to enhance autonomous driving systems. Our setup offers unique insights for developing advanced algorithms for complex driving tasks to accelerate future investigations and developments in this field. The multi-agent simulation framework is available as open-source software: https://github.com/TUM-AVS/Frenetix-Motion-Planner
Frenetix Motion Planner: High-Performance and Modular Trajectory Planning Algorithm for Complex Autonomous Driving Scenarios
Feb 02, 2024Our work aims to present a high-performance and modular sampling-based trajectory planning algorithm for autonomous vehicles. This algorithm is tailored to address the complex challenges in solution space construction and optimization problem formulation within the path planning domain. Our method employs a multi-objective optimization strategy for efficient navigation in static and highly dynamic environments, focusing on optimizing trajectory comfort, safety, and path precision. This algorithm was then used to analyze the algorithm performance and success rate in 1750 virtual complex urban and highway scenarios. Our results demonstrate fast calculation times (8ms for 800 trajectories), a high success rate in complex scenarios (88%), and easy adaptability with different modules presented. The most noticeable difference exhibited was the fast trajectory sampling, feasibility check, and cost evaluation step across various trajectory counts. While our study presents promising results, it's important to note that our assessments have been conducted exclusively in simulated environments, and real-world testing is required to fully validate our findings. The code and the additional modules used in this research are publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-Motion-Planner.
Overcoming Blind Spots: Occlusion Considerations for Improved Autonomous Driving Safety
Feb 02, 2024Our work introduces a module for assessing the trajectory safety of autonomous vehicles in dynamic environments marked by high uncertainty. We focus on occluded areas and occluded traffic participants with limited information about surrounding obstacles. To address this problem, we propose a software module that handles blind spots (BS) created by static and dynamic obstacles in urban environments. We identify potential occluded traffic participants, predict their movement, and assess the ego vehicle's trajectory using various criticality metrics. The method offers a straightforward and modular integration into motion planner algorithms. We present critical real-world scenarios to evaluate our module and apply our approach to a publicly available trajectory planning algorithm. Our results demonstrate that safe yet efficient driving with occluded road users can be achieved by incorporating safety assessments into the planning process. The code used in this research is publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-Occlusion.
A Reinforcement Learning-Boosted Motion Planning Framework: Comprehensive Generalization Performance in Autonomous Driving
Feb 02, 2024This study introduces a novel approach to autonomous motion planning, informing an analytical algorithm with a reinforcement learning (RL) agent within a Frenet coordinate system. The combination directly addresses the challenges of adaptability and safety in autonomous driving. Motion planning algorithms are essential for navigating dynamic and complex scenarios. Traditional methods, however, lack the flexibility required for unpredictable environments, whereas machine learning techniques, particularly reinforcement learning (RL), offer adaptability but suffer from instability and a lack of explainability. Our unique solution synergizes the predictability and stability of traditional motion planning algorithms with the dynamic adaptability of RL, resulting in a system that efficiently manages complex situations and adapts to changing environmental conditions. Evaluation of our integrated approach shows a significant reduction in collisions, improved risk management, and improved goal success rates across multiple scenarios. The code used in this research is publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-RL.
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023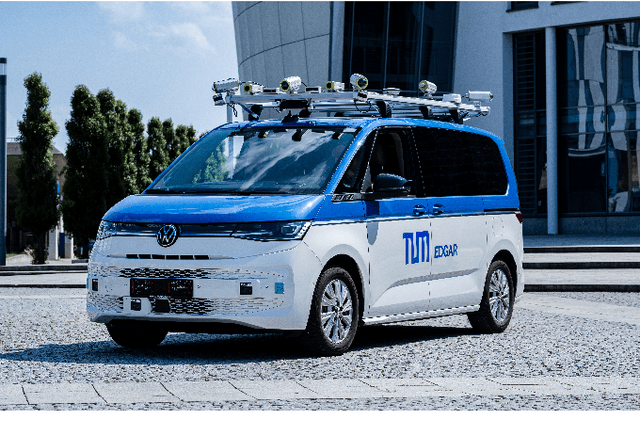
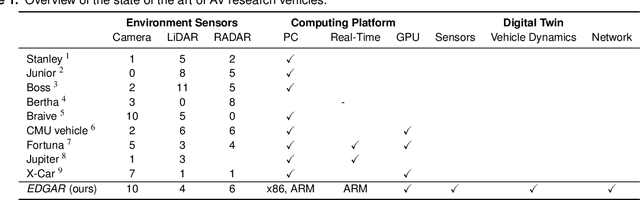

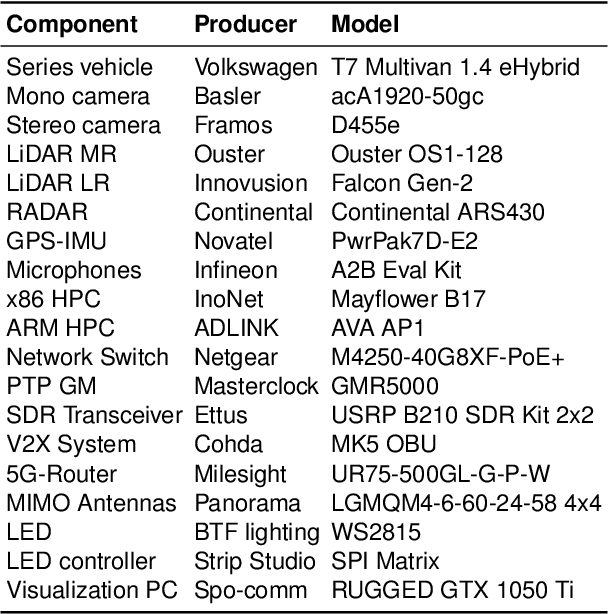
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
TUM Autonomous Motorsport: An Autonomous Racing Software for the Indy Autonomous Challenge
May 31, 2022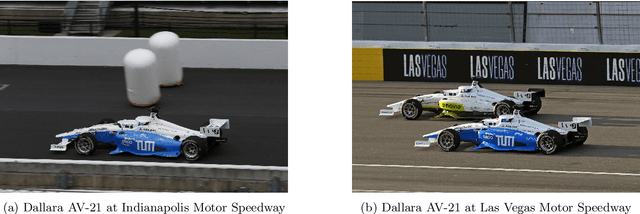
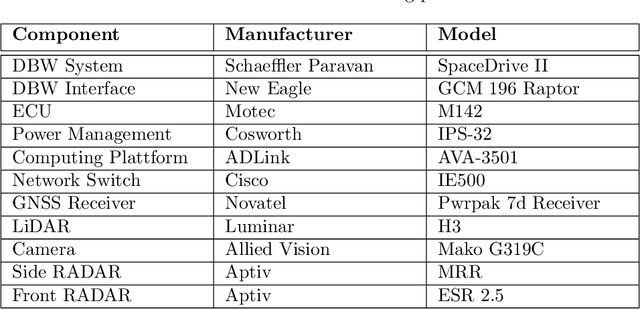
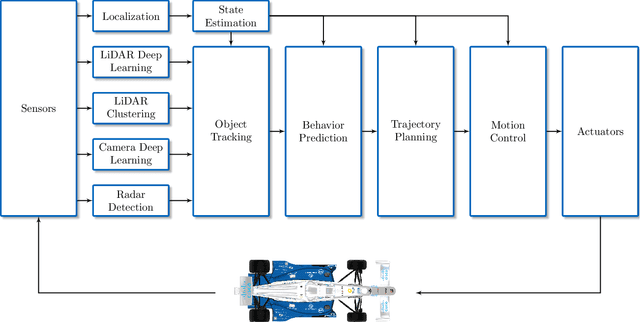
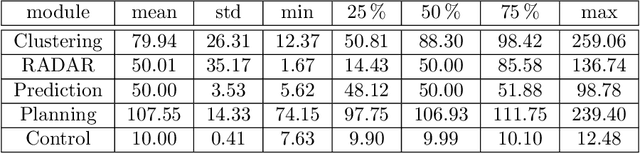
For decades, motorsport has been an incubator for innovations in the automotive sector and brought forth systems like disk brakes or rearview mirrors. Autonomous racing series such as Roborace, F1Tenth, or the Indy Autonomous Challenge (IAC) are envisioned as playing a similar role within the autonomous vehicle sector, serving as a proving ground for new technology at the limits of the autonomous systems capabilities. This paper outlines the software stack and approach of the TUM Autonomous Motorsport team for their participation in the Indy Autonomous Challenge, which holds two competitions: A single-vehicle competition on the Indianapolis Motor Speedway and a passing competition at the Las Vegas Motor Speedway. Nine university teams used an identical vehicle platform: A modified Indy Lights chassis equipped with sensors, a computing platform, and actuators. All the teams developed different algorithms for object detection, localization, planning, prediction, and control of the race cars. The team from TUM placed first in Indianapolis and secured second place in Las Vegas. During the final of the passing competition, the TUM team reached speeds and accelerations close to the limit of the vehicle, peaking at around 270 km/h and 28 ms2. This paper will present details of the vehicle hardware platform, the developed algorithms, and the workflow to test and enhance the software applied during the two-year project. We derive deep insights into the autonomous vehicle's behavior at high speed and high acceleration by providing a detailed competition analysis. Based on this, we deduce a list of lessons learned and provide insights on promising areas of future work based on the real-world evaluation of the displayed concepts.
Indy Autonomous Challenge -- Autonomous Race Cars at the Handling Limits
Feb 08, 2022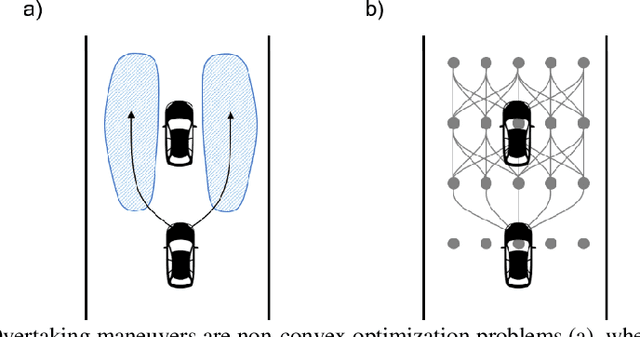
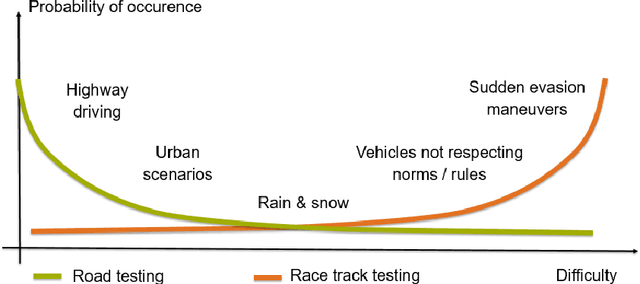

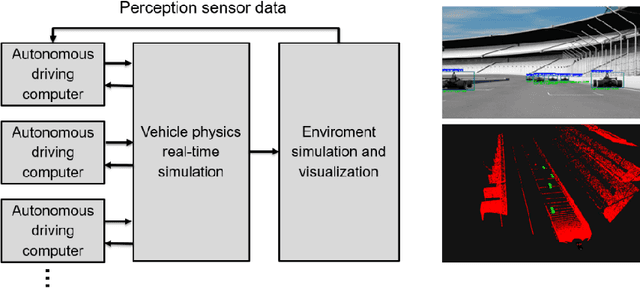
Motorsport has always been an enabler for technological advancement, and the same applies to the autonomous driving industry. The team TUM Auton-omous Motorsports will participate in the Indy Autonomous Challenge in Octo-ber 2021 to benchmark its self-driving software-stack by racing one out of ten autonomous Dallara AV-21 racecars at the Indianapolis Motor Speedway. The first part of this paper explains the reasons for entering an autonomous vehicle race from an academic perspective: It allows focusing on several edge cases en-countered by autonomous vehicles, such as challenging evasion maneuvers and unstructured scenarios. At the same time, it is inherently safe due to the motor-sport related track safety precautions. It is therefore an ideal testing ground for the development of autonomous driving algorithms capable of mastering the most challenging and rare situations. In addition, we provide insight into our soft-ware development workflow and present our Hardware-in-the-Loop simulation setup. It is capable of running simulations of up to eight autonomous vehicles in real time. The second part of the paper gives a high-level overview of the soft-ware architecture and covers our development priorities in building a high-per-formance autonomous racing software: maximum sensor detection range, relia-ble handling of multi-vehicle situations, as well as reliable motion control under uncertainty.