 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHead-to-Head autonomous racing at the limits of handling in the A2RL challenge
Feb 09, 2026Autonomous racing presents a complex challenge involving multi-agent interactions between vehicles operating at the limit of performance and dynamics. As such, it provides a valuable research and testing environment for advancing autonomous driving technology and improving road safety. This article presents the algorithms and deployment strategies developed by the TUM Autonomous Motorsport team for the inaugural Abu Dhabi Autonomous Racing League (A2RL). We showcase how our software emulates human driving behavior, pushing the limits of vehicle handling and multi-vehicle interactions to win the A2RL. Finally, we highlight the key enablers of our success and share our most significant learnings.
Online Velocity Profile Generation and Tracking for Sampling-Based Local Planning Algorithms in Autonomous Racing Environments
May 08, 2025



This work presents an online velocity planner for autonomous racing that adapts to changing dynamic constraints, such as grip variations from tire temperature changes and rubber accumulation. The method combines a forward-backward solver for online velocity optimization with a novel spatial sampling strategy for local trajectory planning, utilizing a three-dimensional track representation. The computed velocity profile serves as a reference for the local planner, ensuring adaptability to environmental and vehicle dynamics. We demonstrate the approach's robust performance and computational efficiency in racing scenarios and discuss its limitations, including sensitivity to deviations from the predefined racing line and high jerk characteristics of the velocity profile.
GripMap: An Efficient, Spatially Resolved Constraint Framework for Offline and Online Trajectory Planning in Autonomous Racing
Apr 16, 2025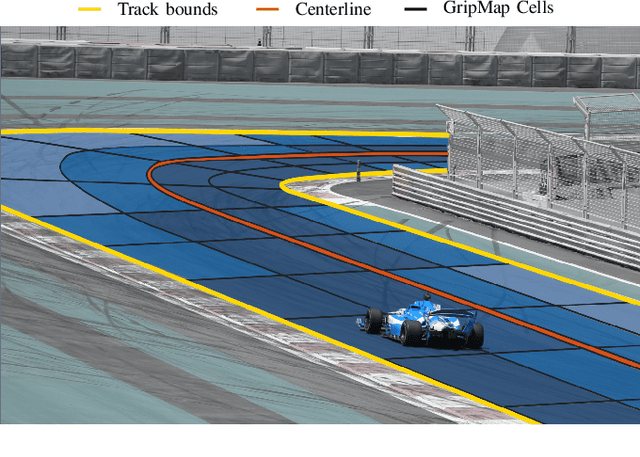
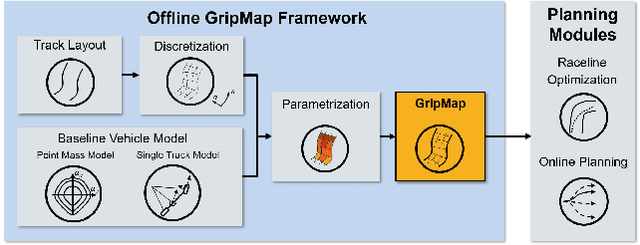
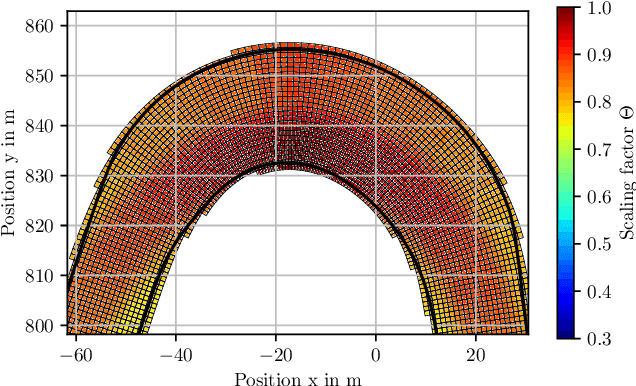
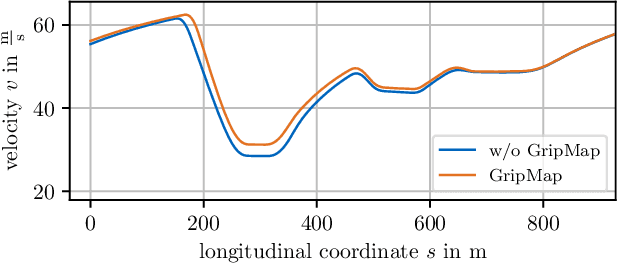
Conventional trajectory planning approaches for autonomous vehicles often assume a fixed vehicle model that remains constant regardless of the vehicle's location. This overlooks the critical fact that the tires and the surface are the two force-transmitting partners in vehicle dynamics; while the tires stay with the vehicle, surface conditions vary with location. Recognizing these challenges, this paper presents a novel framework for spatially resolving dynamic constraints in both offline and online planning algorithms applied to autonomous racing. We introduce the GripMap concept, which provides a spatial resolution of vehicle dynamic constraints in the Frenet frame, allowing adaptation to locally varying grip conditions. This enables compensation for location-specific effects, more efficient vehicle behavior, and increased safety, unattainable with spatially invariant vehicle models. The focus is on low storage demand and quick access through perfect hashing. This framework proved advantageous in real-world applications in the presented form. Experiments inspired by autonomous racing demonstrate its effectiveness. In future work, this framework can serve as a foundational layer for developing future interpretable learning algorithms that adjust to varying grip conditions in real-time.
A Quasi-Steady-State Black Box Simulation Approach for the Generation of g-g-g-v Diagrams
Apr 14, 2025



The classical g-g diagram, representing the achievable acceleration space for a vehicle, is commonly used as a constraint in trajectory planning and control due to its computational simplicity. To address non-planar road geometries, this concept can be extended to incorporate g-g constraints as a function of vehicle speed and vertical acceleration, commonly referred to as g-g-g-v diagrams. However, the estimation of g-g-g-v diagrams is an open problem. Existing simulation-based approaches struggle to isolate non-transient, open-loop stable states across all combinations of speed and acceleration, while optimization-based methods often require simplified vehicle equations and have potential convergence issues. In this paper, we present a novel, open-source, quasi-steady-state black box simulation approach that applies a virtual inertial force in the longitudinal direction. The method emulates the load conditions associated with a specified longitudinal acceleration while maintaining constant vehicle speed, enabling open-loop steering ramps in a purely QSS manner. Appropriate regulation of the ramp steer rate inherently mitigates transient vehicle dynamics when determining the maximum feasible lateral acceleration. Moreover, treating the vehicle model as a black box eliminates model mismatch issues, allowing the use of high-fidelity or proprietary vehicle dynamics models typically unsuited for optimization approaches. An open-source version of the proposed method is available at: https://github.com/TUM-AVS/GGGVDiagrams
Accelerating Autonomy: Insights from Pro Racers in the Era of Autonomous Racing - An Expert Interview Study
May 04, 2024



This research aims to investigate professional racing drivers' expertise to develop an understanding of their cognitive and adaptive skills to create new autonomy algorithms. An expert interview study was conducted with 11 professional race drivers, data analysts, and racing instructors from across prominent racing leagues. The interviews were conducted using an exploratory, non-standardized expert interview format guided by a set of prepared questions. The study investigates drivers' exploration strategies to reach their vehicle limits and contrasts them with the capabilities of state-of-the-art autonomous racing software stacks. Participants were questioned about the techniques and skills they have developed to quickly approach and maneuver at the vehicle limit, ultimately minimizing lap times. The analysis of the interviews was grounded in Mayring's qualitative content analysis framework, which facilitated the organization of the data into multiple categories and subcategories. Our findings create insights into human behavior regarding reaching a vehicle's limit and minimizing lap times. We conclude from the findings the development of new autonomy software modules that allow for more adaptive vehicle behavior. By emphasizing the distinct nuances between manual and autonomous driving techniques, the paper encourages further investigation into human drivers' strategies to maximize their vehicles' capabilities.
TUM Autonomous Motorsport: An Autonomous Racing Software for the Indy Autonomous Challenge
May 31, 2022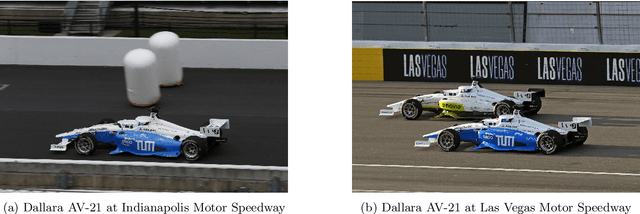
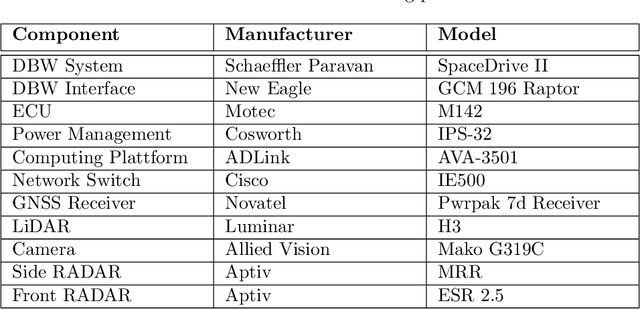
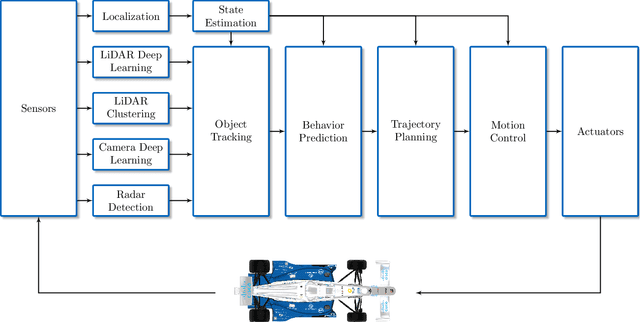
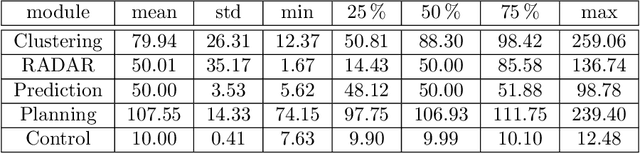
For decades, motorsport has been an incubator for innovations in the automotive sector and brought forth systems like disk brakes or rearview mirrors. Autonomous racing series such as Roborace, F1Tenth, or the Indy Autonomous Challenge (IAC) are envisioned as playing a similar role within the autonomous vehicle sector, serving as a proving ground for new technology at the limits of the autonomous systems capabilities. This paper outlines the software stack and approach of the TUM Autonomous Motorsport team for their participation in the Indy Autonomous Challenge, which holds two competitions: A single-vehicle competition on the Indianapolis Motor Speedway and a passing competition at the Las Vegas Motor Speedway. Nine university teams used an identical vehicle platform: A modified Indy Lights chassis equipped with sensors, a computing platform, and actuators. All the teams developed different algorithms for object detection, localization, planning, prediction, and control of the race cars. The team from TUM placed first in Indianapolis and secured second place in Las Vegas. During the final of the passing competition, the TUM team reached speeds and accelerations close to the limit of the vehicle, peaking at around 270 km/h and 28 ms2. This paper will present details of the vehicle hardware platform, the developed algorithms, and the workflow to test and enhance the software applied during the two-year project. We derive deep insights into the autonomous vehicle's behavior at high speed and high acceleration by providing a detailed competition analysis. Based on this, we deduce a list of lessons learned and provide insights on promising areas of future work based on the real-world evaluation of the displayed concepts.