 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAR-LIO: Enabling High-Speed Autonomy through Fast, Accurate, and Robust LiDAR-Inertial Odometry
Jun 24, 2026Robust and accurate odometry estimation is essential in modern robotics. In environments characterized by highly dynamic motion and sensor noise, odometry estimation becomes increasingly challenging. Autonomous racing combines both factors in an unstructured setting, where minimizing odometry latency is essential for stable closed-loop control. This paper introduces FAR-LIO, a highly optimized CUDA-accelerated LiDAR-inertial odometry framework developed for Fast, Accurate, and Robust performance. Our system leverages a novel CUDA-based voxel hashmap to enable parallelized nearest-neighbor search and efficient map updates. We employ a sparsity-aware Generalized Iterative Closest Point algorithm with adaptive thresholding on top of the CUDA-based voxel hashmap with adaptive density to achieve low-latency without compromising accuracy. An Extended Kalman Filter serves as a robust backend. It utilizes an upsampling and delay compensation strategy to fuse the LiDAR odometry with high-frequency IMU data, thereby ensuring a robust and smooth odometry output. We evaluate FAR-LIO across four different sensor setups, using both public datasets and data from two autonomous racecars driving at speeds of up to 250 km/h. FAR-LIO achieves an average 6.9% reduction in the positional error and 38.4% lower runtime compared to state-of-the-art baselines on target hardware using a single parameter set. This demonstrates its computational efficiency and broad applicability. To build upon our work, our code is available open-source on https://github.com/TUMFTM/FAR-LIO.
Head-to-Head autonomous racing at the limits of handling in the A2RL challenge
Feb 09, 2026Autonomous racing presents a complex challenge involving multi-agent interactions between vehicles operating at the limit of performance and dynamics. As such, it provides a valuable research and testing environment for advancing autonomous driving technology and improving road safety. This article presents the algorithms and deployment strategies developed by the TUM Autonomous Motorsport team for the inaugural Abu Dhabi Autonomous Racing League (A2RL). We showcase how our software emulates human driving behavior, pushing the limits of vehicle handling and multi-vehicle interactions to win the A2RL. Finally, we highlight the key enablers of our success and share our most significant learnings.
RSLCPP -- Deterministic Simulations Using ROS 2
Jan 11, 2026Simulation is crucial in real-world robotics, offering safe, scalable, and efficient environments for developing applications, ranging from humanoid robots to autonomous vehicles and drones. While the Robot Operating System (ROS) has been widely adopted as the backbone of these robotic applications in both academia and industry, its asynchronous, multiprocess design complicates reproducibility, especially across varying hardware platforms. Deterministic callback execution cannot be guaranteed when computation times and communication delays vary. This lack of reproducibility complicates scientific benchmarking and continuous integration, where consistent results are essential. To address this, we present a methodology to create deterministic simulations using ROS 2 nodes. Our ROS Simulation Library for C++ (RSLCPP) implements this approach, enabling existing nodes to be combined into a simulation routine that yields reproducible results without requiring any code changes. We demonstrate that our approach yields identical results across various CPUs and architectures when testing both a synthetic benchmark and a real-world robotics system. RSLCPP is open-sourced at https://github.com/TUMFTM/rslcpp.
OpenLiDARMap: Zero-Drift Point Cloud Mapping using Map Priors
Jan 19, 2025



Accurate localization is a critical component of mobile autonomous systems, especially in Global Navigation Satellite Systems (GNSS)-denied environments where traditional methods fail. In such scenarios, environmental sensing is essential for reliable operation. However, approaches such as LiDAR odometry and Simultaneous Localization and Mapping (SLAM) suffer from drift over long distances, especially in the absence of loop closures. Map-based localization offers a robust alternative, but the challenge lies in creating and georeferencing maps without GNSS support. To address this issue, we propose a method for creating georeferenced maps without GNSS by using publicly available data, such as building footprints and surface models derived from sparse aerial scans. Our approach integrates these data with onboard LiDAR scans to produce dense, accurate, georeferenced 3D point cloud maps. By combining an Iterative Closest Point (ICP) scan-to-scan and scan-to-map matching strategy, we achieve high local consistency without suffering from long-term drift. Thus, we eliminate the reliance on GNSS for the creation of georeferenced maps. The results demonstrate that LiDAR-only mapping can produce accurate georeferenced point cloud maps when augmented with existing map priors.
Three-Dimensional Vehicle Dynamics State Estimation for High-Speed Race Cars under varying Signal Quality
Aug 27, 2024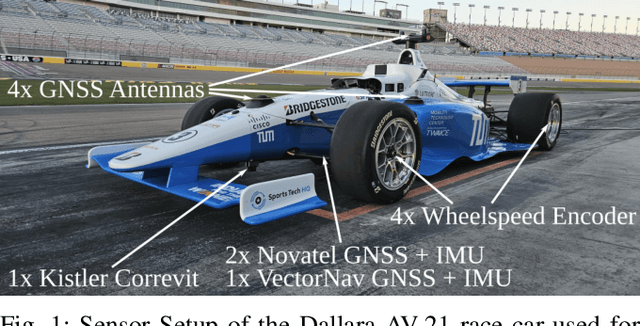
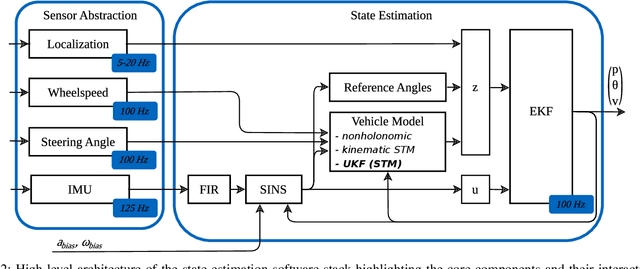
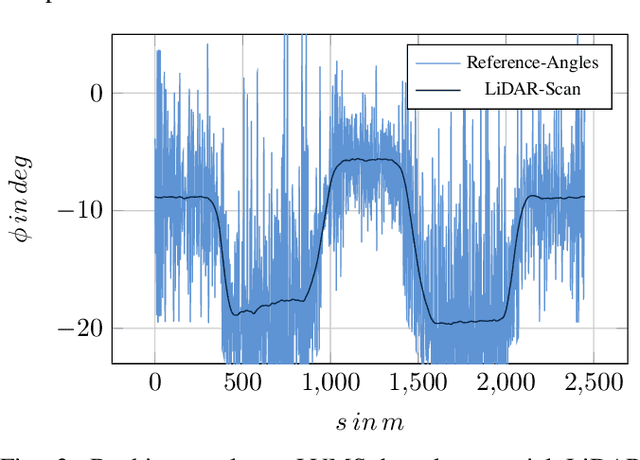
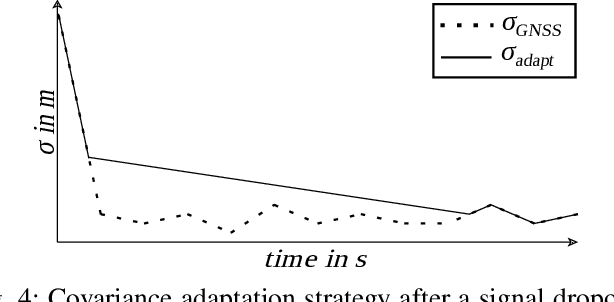
This work aims to present a three-dimensional vehicle dynamics state estimation under varying signal quality. Few researchers have investigated the impact of three-dimensional road geometries on the state estimation and, thus, neglect road inclination and banking. Especially considering high velocities and accelerations, the literature does not address these effects. Therefore, we compare two- and three-dimensional state estimation schemes to outline the impact of road geometries. We use an Extended Kalman Filter with a point-mass motion model and extend it by an additional formulation of reference angles. Furthermore, virtual velocity measurements significantly improve the estimation of road angles and the vehicle's side slip angle. We highlight the importance of steady estimations for vehicle motion control algorithms and demonstrate the challenges of degraded signal quality and Global Navigation Satellite System dropouts. The proposed adaptive covariance facilitates a smooth estimation and enables stable controller behavior. The developed state estimation has been deployed on a high-speed autonomous race car at various racetracks. Our findings indicate that our approach outperforms state-of-the-art vehicle dynamics state estimators and an industry-grade Inertial Navigation System. Further studies are needed to investigate the performance under varying track conditions and on other vehicle types.