 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-Dimensional Vehicle Dynamics State Estimation for High-Speed Race Cars under varying Signal Quality
Paper and Code
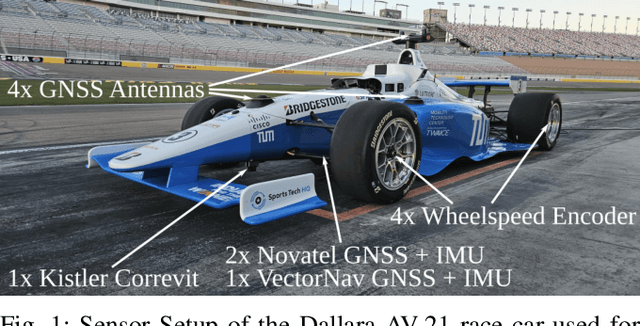
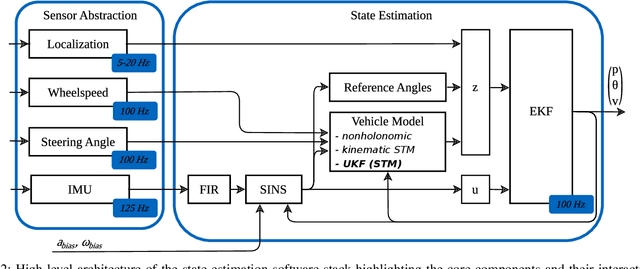
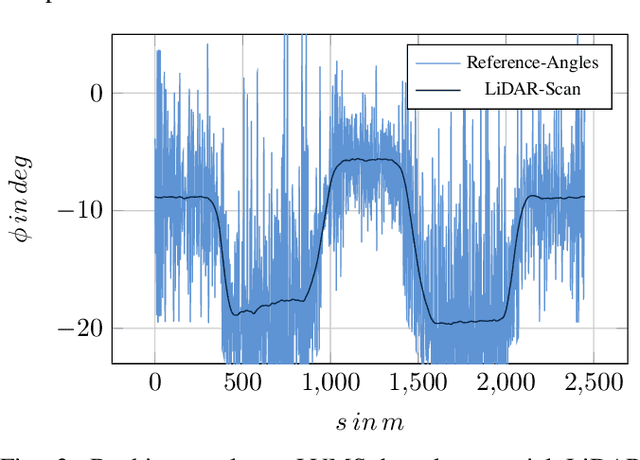
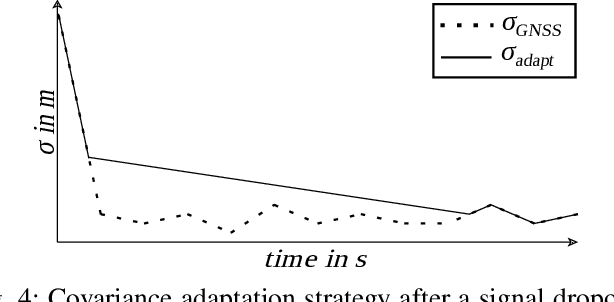
This work aims to present a three-dimensional vehicle dynamics state estimation under varying signal quality. Few researchers have investigated the impact of three-dimensional road geometries on the state estimation and, thus, neglect road inclination and banking. Especially considering high velocities and accelerations, the literature does not address these effects. Therefore, we compare two- and three-dimensional state estimation schemes to outline the impact of road geometries. We use an Extended Kalman Filter with a point-mass motion model and extend it by an additional formulation of reference angles. Furthermore, virtual velocity measurements significantly improve the estimation of road angles and the vehicle's side slip angle. We highlight the importance of steady estimations for vehicle motion control algorithms and demonstrate the challenges of degraded signal quality and Global Navigation Satellite System dropouts. The proposed adaptive covariance facilitates a smooth estimation and enables stable controller behavior. The developed state estimation has been deployed on a high-speed autonomous race car at various racetracks. Our findings indicate that our approach outperforms state-of-the-art vehicle dynamics state estimators and an industry-grade Inertial Navigation System. Further studies are needed to investigate the performance under varying track conditions and on other vehicle types.