 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultirotor Nonlinear Model Predictive Control based on Visual Servoing of Evolving Features
Sep 25, 2024This article presents a Visual Servoing Nonlinear Model Predictive Control (NMPC) scheme for autonomously tracking a moving target using multirotor Unmanned Aerial Vehicles (UAVs). The scheme is developed for surveillance and tracking of contour-based areas with evolving features. NMPC is used to manage input and state constraints, while additional barrier functions are incorporated in order to ensure system safety and optimal performance. The proposed control scheme is designed based on the extraction and implementation of the full dynamic model of the features describing the target and the state variables. Real-time simulations and experiments using a quadrotor UAV equipped with a camera demonstrate the effectiveness of the proposed strategy.
Harmonic Field-based Provable Exploration of 3D Indoor Environments
Mar 13, 2023



This work presents an safe and efficient methodology for autonomous indoor exploration with aerial robots using Harmonic Potential Fields (HPF). The challenge of applying HPF in complex 3D environments rests on high computational load involved in solving the Laplace equation. To address this issue, the proposed solution utilizes the Fast Multiple accelerated Boundary Element Method with boundary values controlled to ensure both safety and convergence. The methodology is validated through simulations, which demonstrate its properties of efficiency, safety and convergence.
A Distributed Predictive Control Approach for Cooperative Manipulation of Multiple Underwater Vehicle Manipulator Systems
Jun 23, 2019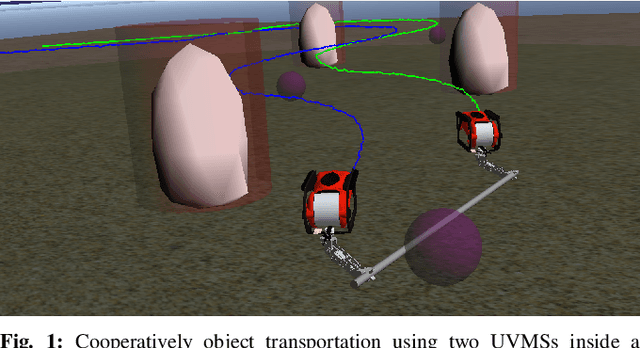
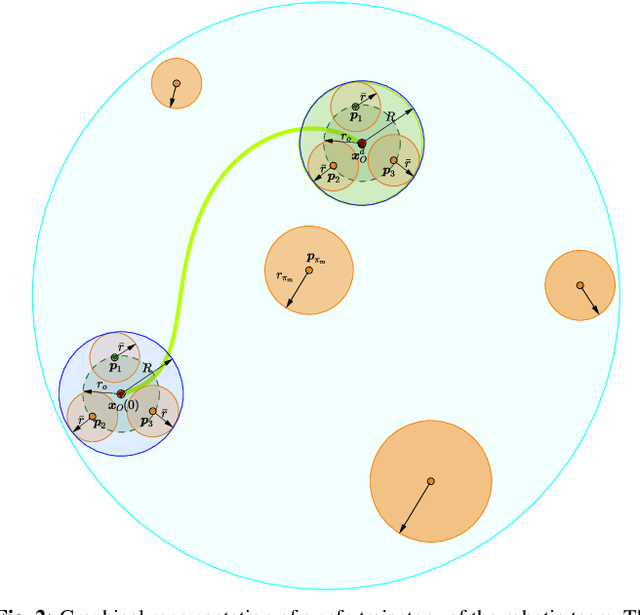
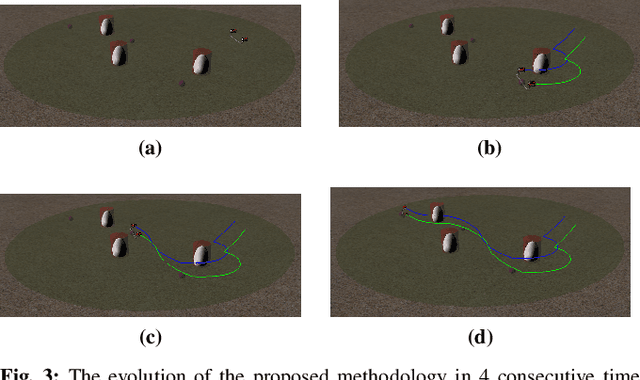
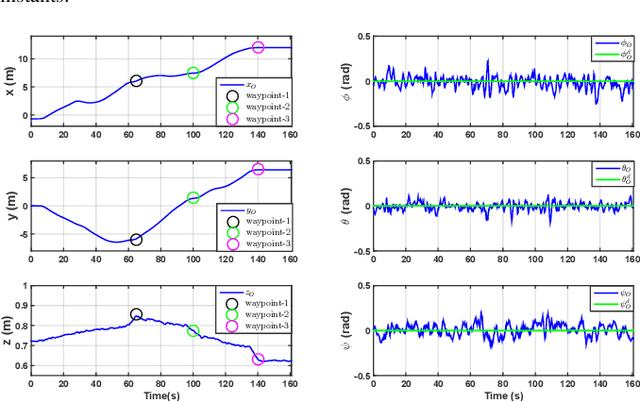
This paper addresses the problem of cooperative object transportation for multiple Underwater Vehicle Manipulator Systems (UVMSs) in a constrained workspace involving static obstacles. We propose a Nonlinear Model Predictive Control (NMPC) approach for a team of UVMSs in order to transport an object while avoiding significant constraints and limitations such as: kinematic and representation singularities, obstacles within the workspace, joint limits and control input saturations. More precisely, by exploiting the coupled dynamics between the robots and the object, and using certain load sharing coefficients, we design a distributed NMPC for each UVMS in order to cooperatively transport the object within the workspace's feasible region. Moreover, the control scheme adopts load sharing among the UVMSs according to their specific payload capabilities. Additionally, the feedback relies on each UVMS's locally measurements and no explicit data is exchanged online among the robots, thus reducing the required communication bandwidth. Finally, real-time simulation results conducted in UwSim dynamic simulator running in ROS environment verify the efficiency of the theoretical finding.
Decentralized Impedance Control for Cooperative Manipulation of Multiple Underwater Vehicle Manipulator Systems under Lean Communication
May 11, 2019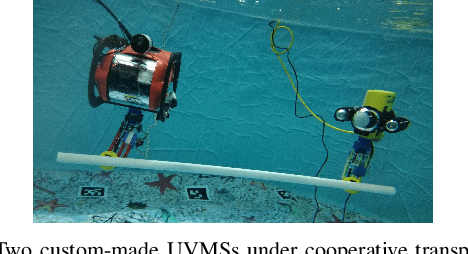
This paper addresses the problem of cooperative object transportation for multiple Underwater Vehicle Manipulator Systems (UVMSs) in a constrained workspace with static obstacles, where the coordination relies solely on implicit communication arising from the physical interaction of the robots with the commonly grasped object. We propose a novel distributed leader-follower architecture, where the leading UVMS, which has knowledge of the object's desired trajectory, tries to achieve the desired tracking behavior via an impedance control law, navigating in this way, the overall formation towards the goal configuration while avoiding collisions with the obstacles. On the other hand, the following UVMSs estimate the object's desired trajectory via a novel prescribed performance estimation law and implement a similar impedance control law. The feedback relies on each UVMS's force/torque measurements and no explicit data is exchanged online among the robots. Moreover, the control scheme adopts load sharing among the UVMSs according to their specific payload capabilities. Finally, various simulation studies clarify the proposed method and verify its efficiency.
A Robust Model Predictive Control Approach for Autonomous Underwater Vehicles Operating in a Constrained workspace
Jun 14, 2018
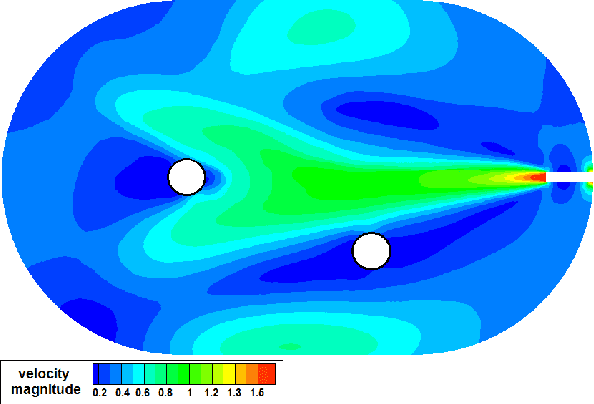
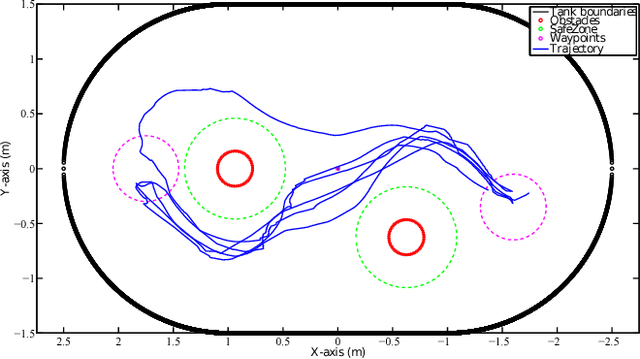
This paper presents a novel Nonlinear Model Predictive Control (NMPC) scheme for underwater robotic vehicles operating in a constrained workspace including static obstacles. The purpose of the controller is to guide the vehicle towards specific way points. Various limitations such as: obstacles, workspace boundary, thruster saturation and predefined desired upper bound of the vehicle velocity are captured as state and input constraints and are guaranteed during the control design. The proposed scheme incorporates the full dynamics of the vehicle in which the ocean currents are also involved. Hence, the control inputs calculated by the proposed scheme are formulated in a way that the vehicle will exploit the ocean currents, when these are in favor of the way-point tracking mission which results in reduced energy consumption by the thrusters. The performance of the proposed control strategy is experimentally verified using a $4$ Degrees of Freedom (DoF) underwater robotic vehicle inside a constrained test tank with obstacles.
A Robust Force Control Approach for Underwater Vehicle Manipulator Systems
Apr 04, 2017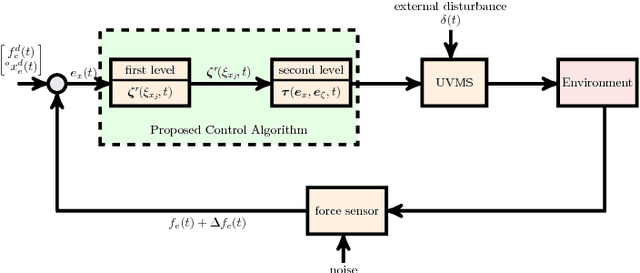
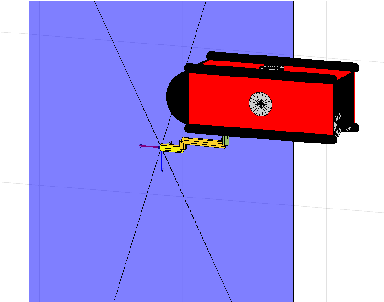
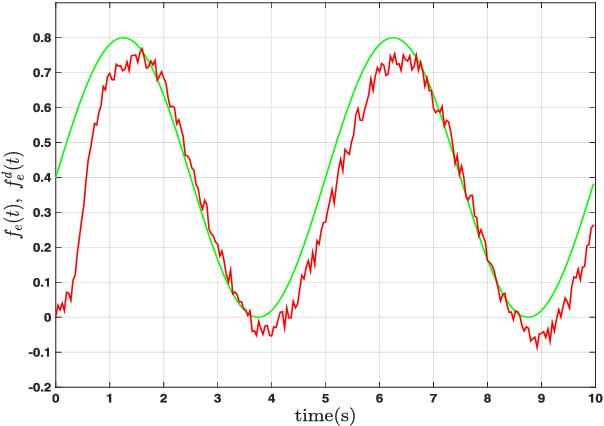
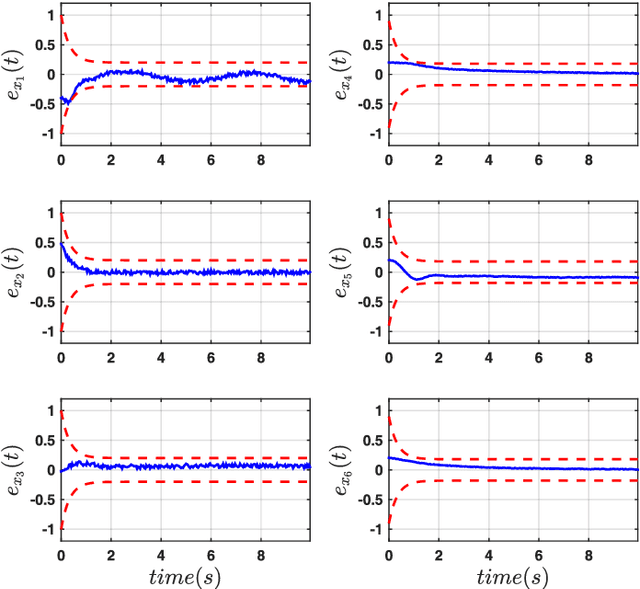
In various interaction tasks using Underwater Vehicle Manipulator Systems (UVMSs) (e.g. sampling of the sea organisms, underwater welding), important factors such as: i) uncertainties and complexity of UVMS dynamic model ii) external disturbances (e.g. sea currents and waves) iii) imperfection and noises of measuring sensors iv) steady state performance as well as v) inferior overshoot of interaction force error, should be addressed during the force control design. Motivated by the above factors, this paper presents a model-free control protocol for force controlling of an Underwater Vehicle Manipulator System which is in contact with a compliant environment, without incorporating any knowledge of the UVMS's dynamic model, exogenous disturbances and sensor's noise model. Moreover, the transient and steady state response as well as reduction of overshooting force error are solely determined by certain designer-specified performance functions and are fully decoupled by the UVMS's dynamic model, the control gain selection, as well as the initial conditions. Finally, a simulation study clarifies the proposed method and verifies its efficiency.
Mechanical Design, Modelling and Control of a Novel Aerial Manipulator
Feb 26, 2015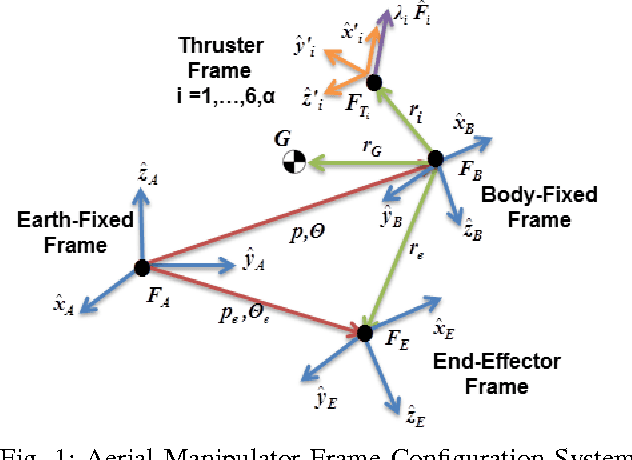
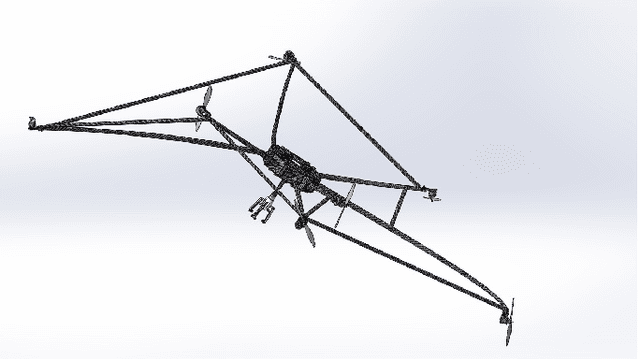
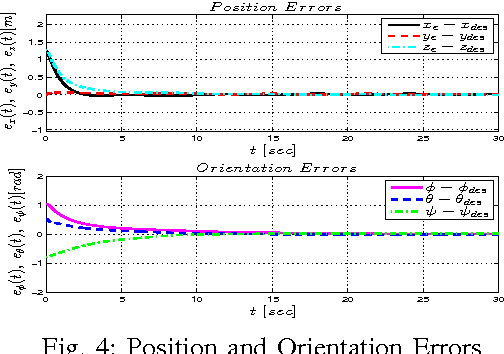
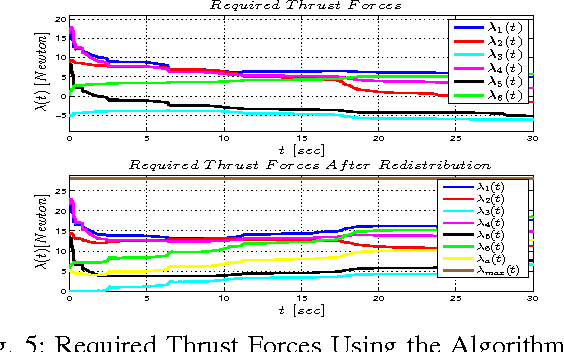
In this paper a novel aerial manipulation system is proposed. The mechanical structure of the system, the number of thrusters and their geometry will be derived from technical optimization problems. The aforementioned problems are defined by taking into consideration the desired actuation forces and torques applied to the end-effector of the system. The framework of the proposed system is designed in a CAD Package in order to evaluate the system parameter values. Following this, the kinematic and dynamic models are developed and an adaptive backstepping controller is designed aiming to control the exact position and orientation of the end-effector in the Cartesian space. Finally, the performance of the system is demonstrated through a simulation study, where a manipulation task scenario is investigated.