 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarmonic Field-based Provable Exploration of 3D Indoor Environments
Mar 13, 2023



This work presents an safe and efficient methodology for autonomous indoor exploration with aerial robots using Harmonic Potential Fields (HPF). The challenge of applying HPF in complex 3D environments rests on high computational load involved in solving the Laplace equation. To address this issue, the proposed solution utilizes the Fast Multiple accelerated Boundary Element Method with boundary values controlled to ensure both safety and convergence. The methodology is validated through simulations, which demonstrate its properties of efficiency, safety and convergence.
2-D Directed Formation Control Based on Bipolar Coordinates
Aug 02, 2021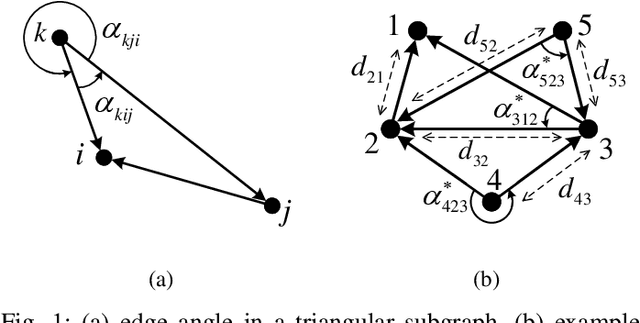
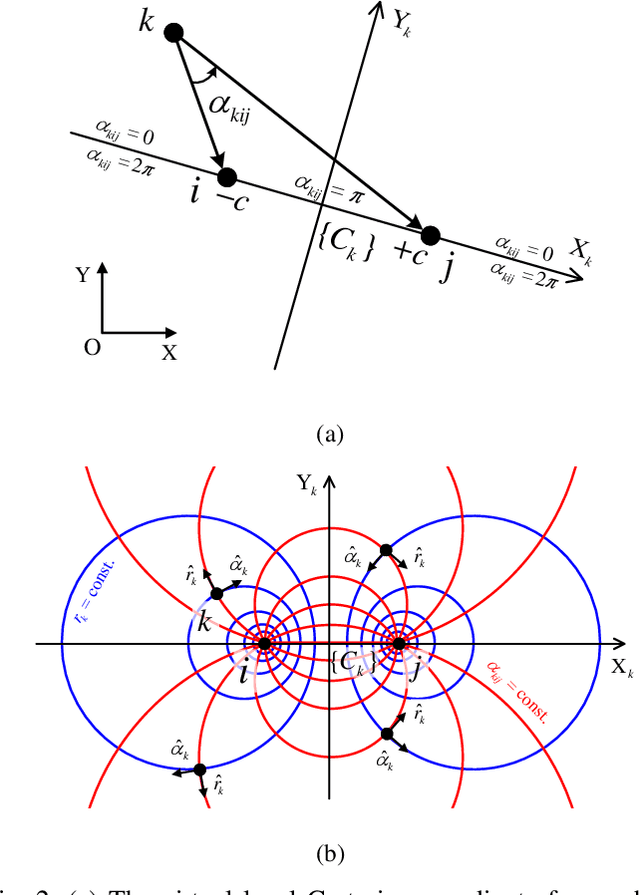
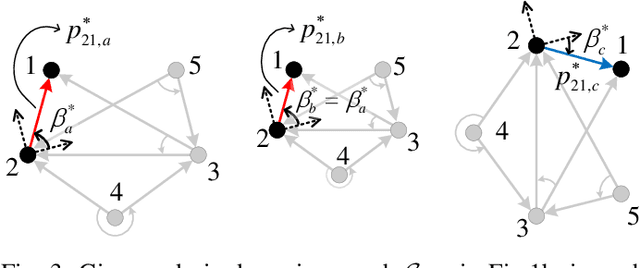
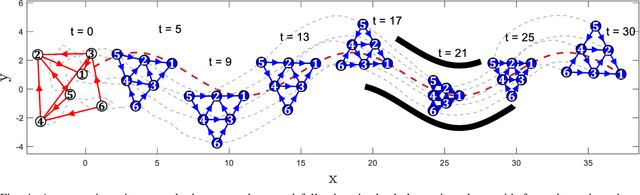
This work proposes a novel 2-D formation control scheme for acyclic triangulated directed graphs (a class of minimally acyclic persistent graphs) based on bipolar coordinates with (almost) global convergence to the desired shape. Prescribed performance control is employed to devise a decentralized control law that avoids singularities and introduces robustness against external disturbances while ensuring predefined transient and steady-state performance for the closed-loop system. Furthermore, it is shown that the proposed formation control scheme can handle formation maneuvering, scaling, and orientation specifications simultaneously. Additionally, the proposed control law is implementable in the agents' arbitrarily oriented local coordinate frames using only low-cost onboard vision sensors, which are favorable for practical applications. Finally, various simulation studies clarify and verify the proposed approach.
Prescribed Performance Distance-Based Formation Control of Multi-Agent Systems (Extended Version)
Nov 17, 2019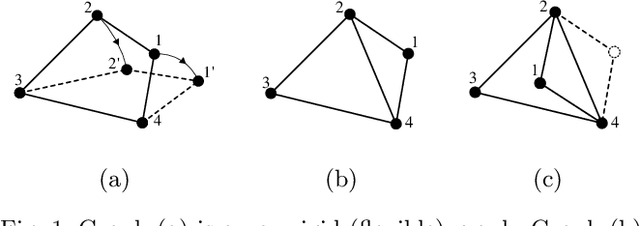
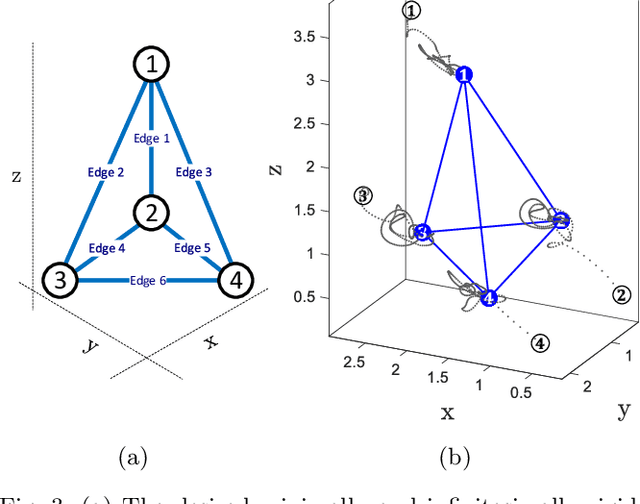

This paper presents a novel control protocol for robust distance-based formation control with prescribed performance in which agents are subjected to unknown external disturbances. Connectivity maintenance and collision avoidance among neighboring agents are also handled by the appropriate design of certain performance bounds that constrain the inter-agent distance errors. As an extension to the proposed scheme, distance-based formation centroid maneuvering is also studied for disturbance-free agents, in which the formation centroid tracks a desired time-varying velocity. The proposed control laws are decentralized, in the sense that each agent employs local relative information regarding its neighbors to calculate its control signal. Therefore, the control scheme is implementable on the agents' local coordinate frames. Using rigid graph theory, input-to-state stability, and Lyapunov based analysis, the results are established for minimally and infinitesimally rigid formations in 2-D or 3-D space. Furthermore, it is argued that the proposed approach increases formation robustness against shape distortions and can prevent formation convergence to incorrect shapes, which is likely to happen in conventional distance-based formation control methods. Finally, extensive simulation studies clarify and verify the proposed approach.
Decentralized Impedance Control for Cooperative Manipulation of Multiple Underwater Vehicle Manipulator Systems under Lean Communication
May 11, 2019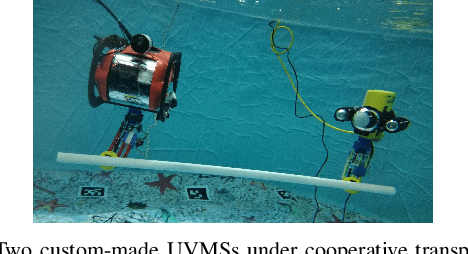
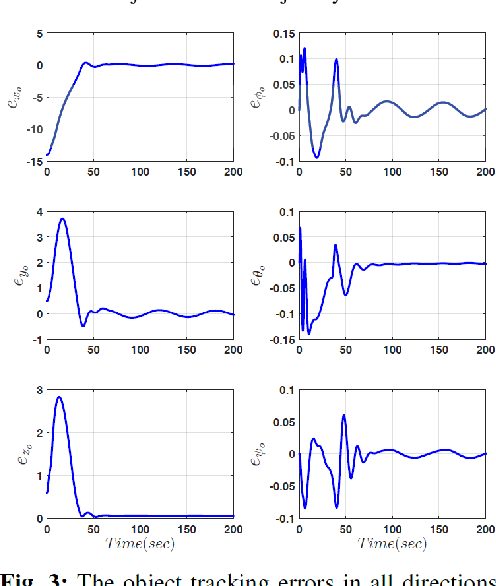
This paper addresses the problem of cooperative object transportation for multiple Underwater Vehicle Manipulator Systems (UVMSs) in a constrained workspace with static obstacles, where the coordination relies solely on implicit communication arising from the physical interaction of the robots with the commonly grasped object. We propose a novel distributed leader-follower architecture, where the leading UVMS, which has knowledge of the object's desired trajectory, tries to achieve the desired tracking behavior via an impedance control law, navigating in this way, the overall formation towards the goal configuration while avoiding collisions with the obstacles. On the other hand, the following UVMSs estimate the object's desired trajectory via a novel prescribed performance estimation law and implement a similar impedance control law. The feedback relies on each UVMS's force/torque measurements and no explicit data is exchanged online among the robots. Moreover, the control scheme adopts load sharing among the UVMSs according to their specific payload capabilities. Finally, various simulation studies clarify the proposed method and verify its efficiency.