 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Model Predictive Control Approach for Autonomous Underwater Vehicles Operating in a Constrained workspace
Paper and Code
Jun 14, 2018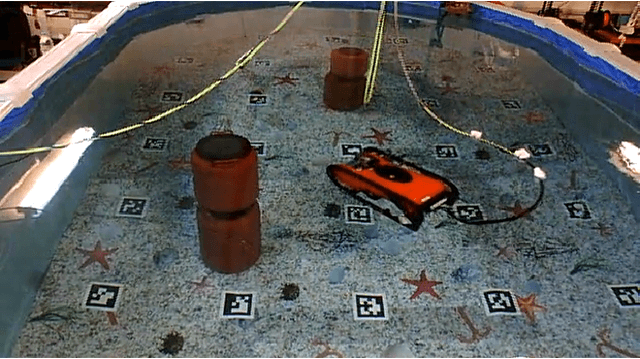
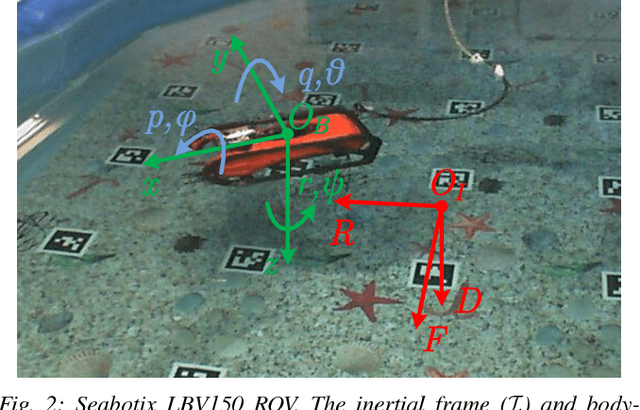
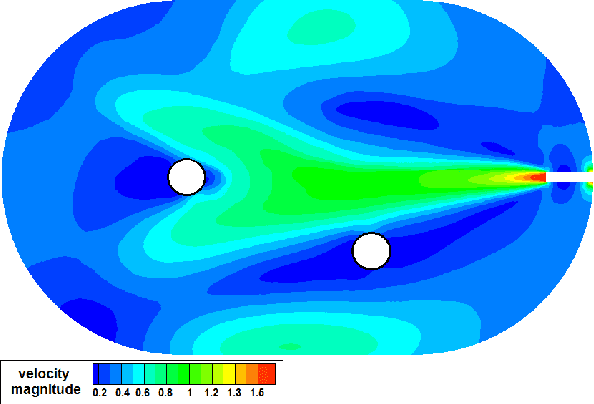
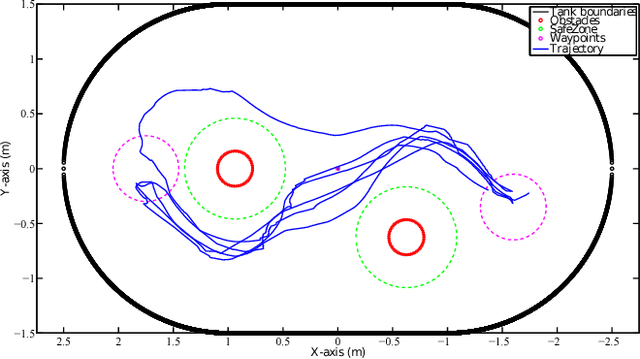
This paper presents a novel Nonlinear Model Predictive Control (NMPC) scheme for underwater robotic vehicles operating in a constrained workspace including static obstacles. The purpose of the controller is to guide the vehicle towards specific way points. Various limitations such as: obstacles, workspace boundary, thruster saturation and predefined desired upper bound of the vehicle velocity are captured as state and input constraints and are guaranteed during the control design. The proposed scheme incorporates the full dynamics of the vehicle in which the ocean currents are also involved. Hence, the control inputs calculated by the proposed scheme are formulated in a way that the vehicle will exploit the ocean currents, when these are in favor of the way-point tracking mission which results in reduced energy consumption by the thrusters. The performance of the proposed control strategy is experimentally verified using a $4$ Degrees of Freedom (DoF) underwater robotic vehicle inside a constrained test tank with obstacles.