 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Design, Modelling and Control of a Novel Aerial Manipulator
Paper and Code
Feb 26, 2015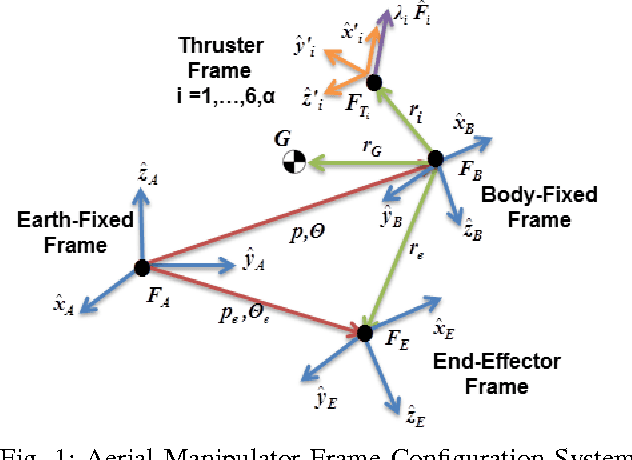
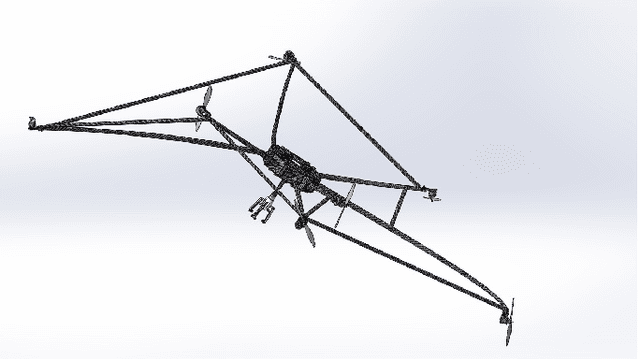
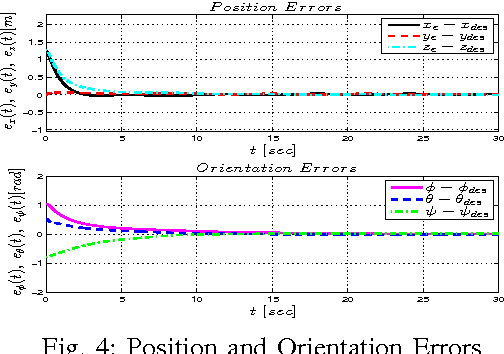
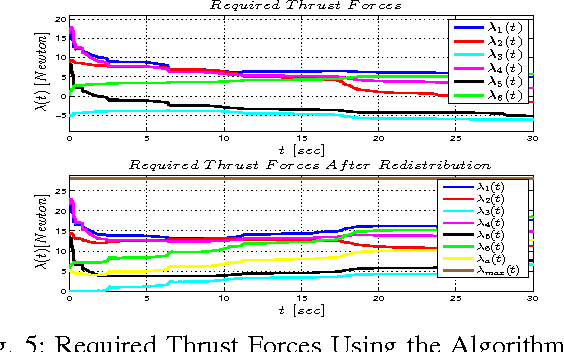
In this paper a novel aerial manipulation system is proposed. The mechanical structure of the system, the number of thrusters and their geometry will be derived from technical optimization problems. The aforementioned problems are defined by taking into consideration the desired actuation forces and torques applied to the end-effector of the system. The framework of the proposed system is designed in a CAD Package in order to evaluate the system parameter values. Following this, the kinematic and dynamic models are developed and an adaptive backstepping controller is designed aiming to control the exact position and orientation of the end-effector in the Cartesian space. Finally, the performance of the system is demonstrated through a simulation study, where a manipulation task scenario is investigated.