 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed-Integer vs. Continuous Model Predictive Control for Binary Thrusters: A Comparative Study
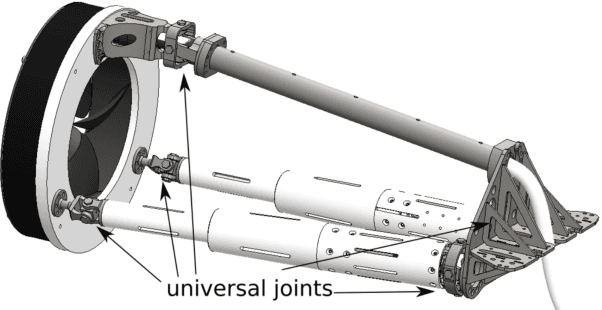
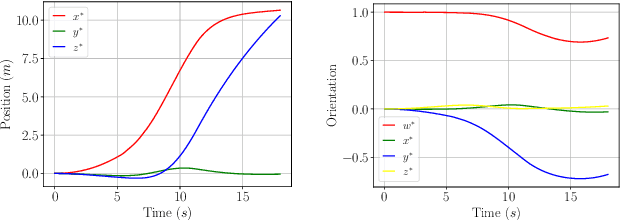
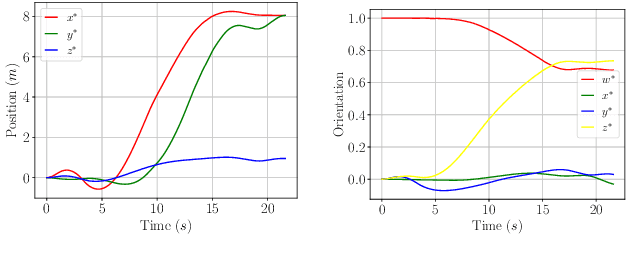
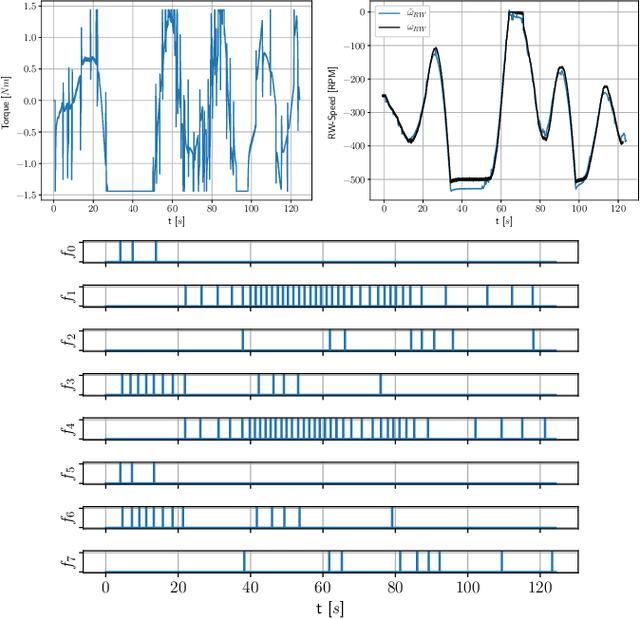
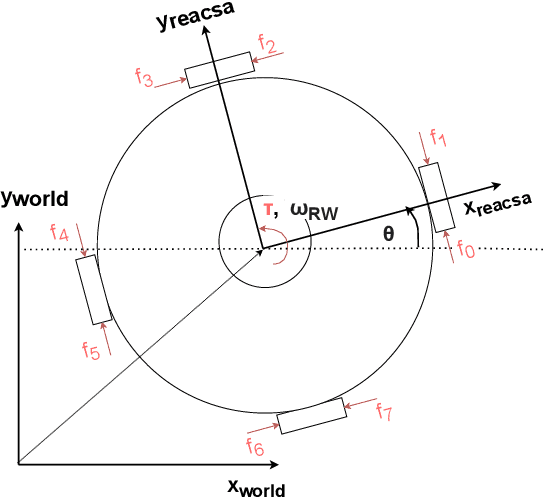
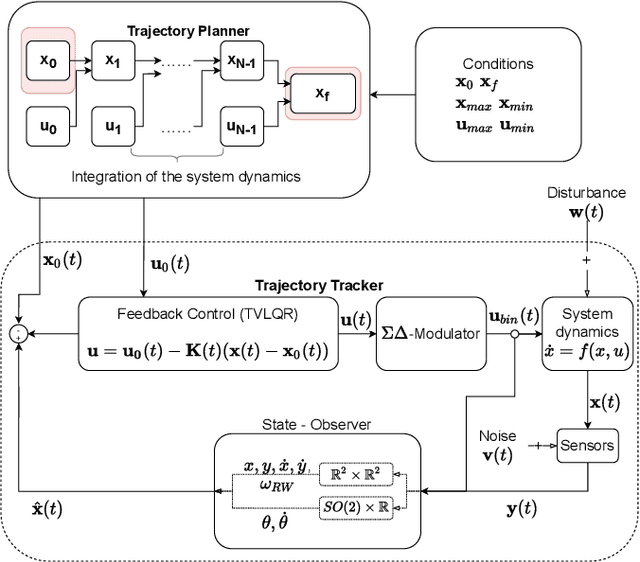
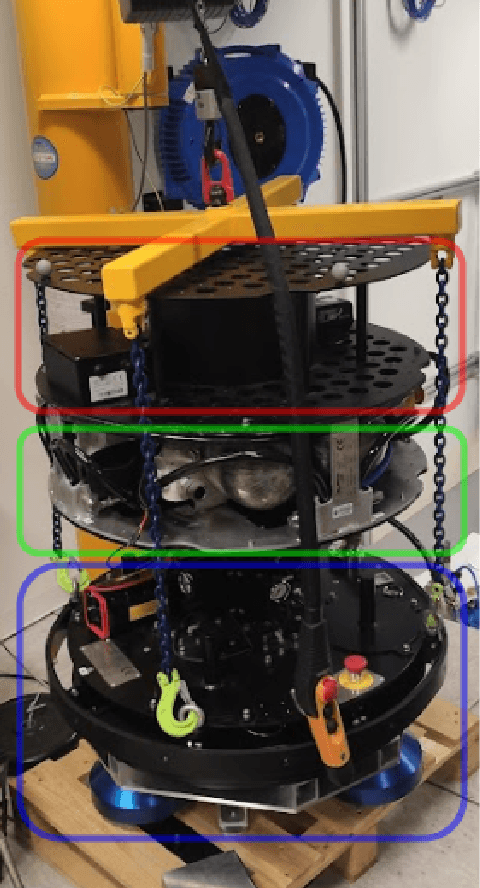
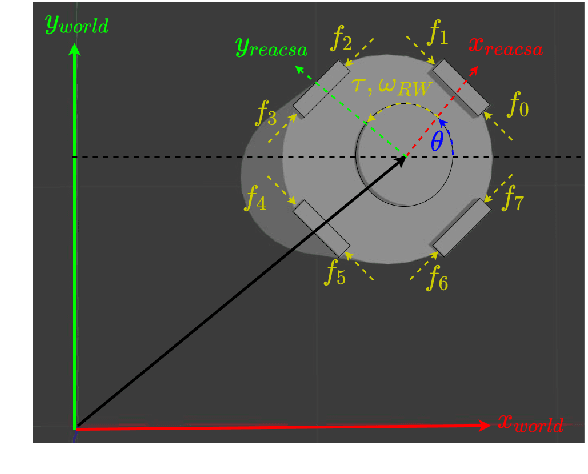
Mar 23, 2026Binary on/off thrusters are commonly used for spacecraft attitude and position control during proximity operations. However, their discrete nature poses challenges for conventional continuous control methods. The control of these discrete actuators is either explicitly formulated as a mixed-integer optimization problem or handled in a two-layer approach, where a continuous controller's output is converted to binary commands using analog-to digital modulation techniques such as Delta-Sigma-modulation. This paper provides the first systematic comparison between these two paradigms for binary thruster control, contrasting continuous Model Predictive Control (MPC) with Delta-Sigma modulation against direct Mixed-Integer MPC (MIMPC) approaches. Furthermore, we propose a new variant of MPC for binary actuated systems, which is informed using the state of the Delta-Sigma Modulator. The two variations for the continuous MPC along with the MIMPC are evaluated through extensive simulations using ESA's REACSA platform. Results demonstrate that while all approaches perform similarly in high-thrust regimes, MIMPC achieves superior fuel efficiency in low-thrust conditions. Continuous MPC with modulation shows instabilities at higher thrust levels, while binary informed MPC, which incorporates modulator dynamics, improves robustness and reduces the efficiency gap to the MIMPC. It can be seen from the simulated and real-system experiments that MIMPC offers complete stability and fuel efficiency benefits, particularly for resource-constrained missions, while continuous control methods remain attractive for computationally limited applications.
Adaptive Model-Base Control of Quadrupeds via Online System Identification using Kalman Filter
Jun 16, 2025Many real-world applications require legged robots to be able to carry variable payloads. Model-based controllers such as model predictive control (MPC) have become the de facto standard in research for controlling these systems. However, most model-based control architectures use fixed plant models, which limits their applicability to different tasks. In this paper, we present a Kalman filter (KF) formulation for online identification of the mass and center of mass (COM) of a four-legged robot. We evaluate our method on a quadrupedal robot carrying various payloads and find that it is more robust to strong measurement noise than classical recursive least squares (RLS) methods. Moreover, it improves the tracking performance of the model-based controller with varying payloads when the model parameters are adjusted at runtime.
Reinforcement Learning for Robust Athletic Intelligence: Lessons from the 2nd 'AI Olympics with RealAIGym' Competition
Mar 19, 2025In the field of robotics many different approaches ranging from classical planning over optimal control to reinforcement learning (RL) are developed and borrowed from other fields to achieve reliable control in diverse tasks. In order to get a clear understanding of their individual strengths and weaknesses and their applicability in real world robotic scenarios is it important to benchmark and compare their performances not only in a simulation but also on real hardware. The '2nd AI Olympics with RealAIGym' competition was held at the IROS 2024 conference to contribute to this cause and evaluate different controllers according to their ability to solve a dynamic control problem on an underactuated double pendulum system with chaotic dynamics. This paper describes the four different RL methods submitted by the participating teams, presents their performance in the swing-up task on a real double pendulum, measured against various criteria, and discusses their transferability from simulation to real hardware and their robustness to external disturbances.
Benchmarking Different QP Formulations and Solvers for Dynamic Quadrupedal Walking
Feb 03, 2025
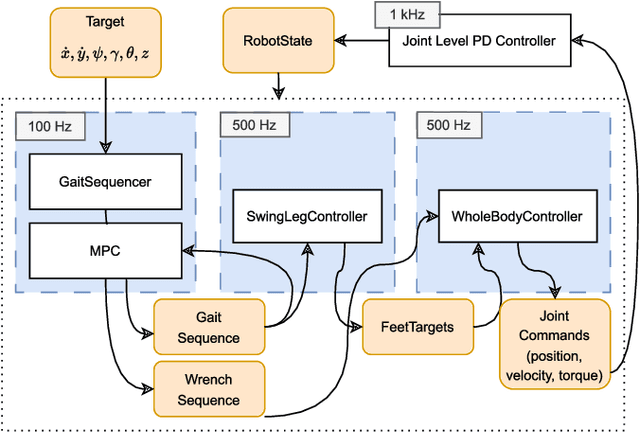
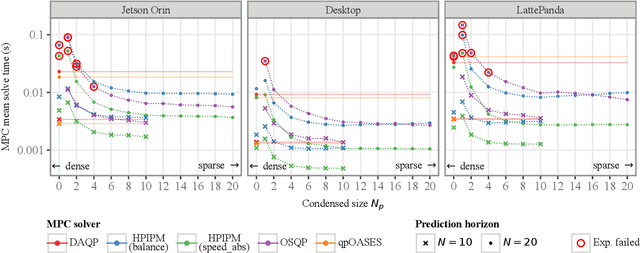
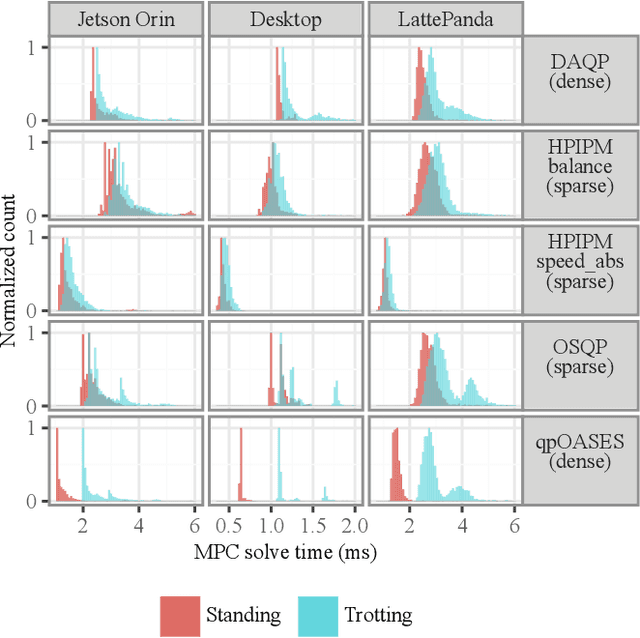
Quadratic Programs (QPs) are widely used in the control of walking robots, especially in Model Predictive Control (MPC) and Whole-Body Control (WBC). In both cases, the controller design requires the formulation of a QP and the selection of a suitable QP solver, both requiring considerable time and expertise. While computational performance benchmarks exist for QP solvers, studies comparing optimal combinations of computational hardware (HW), QP formulation, and solver performance are lacking. In this work, we compare dense and sparse QP formulations, and multiple solving methods on different HW architectures, focusing on their computational efficiency in dynamic walking of four legged robots using MPC. We introduce the Solve Frequency per Watt (SFPW) as a performance measure to enable a cross hardware comparison of the efficiency of QP solvers. We also benchmark different QP solvers for WBC that we use for trajectory stabilization in quadrupedal walking. As a result, this paper provides recommendations for the selection of QP formulations and solvers for different HW architectures in walking robots and indicates which problems should be devoted the greater technical effort in this domain in future.
Model Predictive Parkour Control of a Monoped Hopper in Dynamically Changing Environments
Aug 26, 2024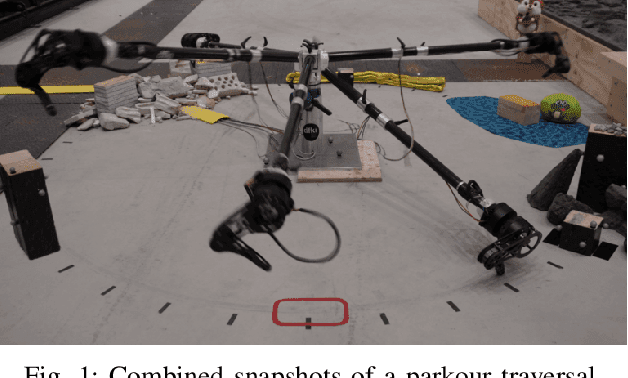
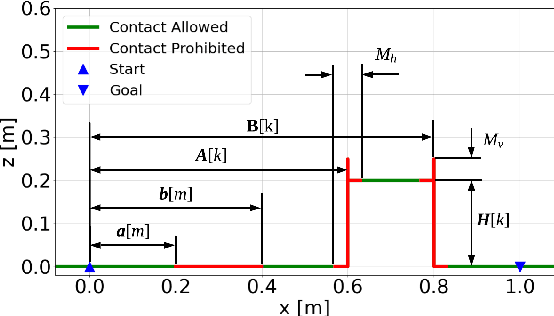
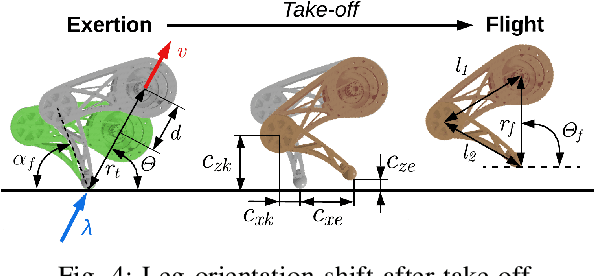
A great advantage of legged robots is their ability to operate on particularly difficult and obstructed terrain, which demands dynamic, robust, and precise movements. The study of obstacle courses provides invaluable insights into the challenges legged robots face, offering a controlled environment to assess and enhance their capabilities. Traversing it with a one-legged hopper introduces intricate challenges, such as planning over contacts and dealing with flight phases, which necessitates a sophisticated controller. A novel model predictive parkour controller is introduced, that finds an optimal path through a real-time changing obstacle course with mixed integer motion planning. The execution of this optimized path is then achieved through a state machine employing a PD control scheme with feedforward torques, ensuring robust and accurate performance.
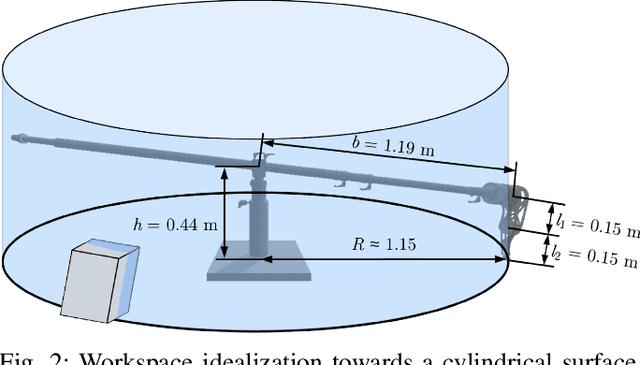
AUV trajectory optimization with hydrodynamic forces for Icy Moon Exploration
Jun 14, 2024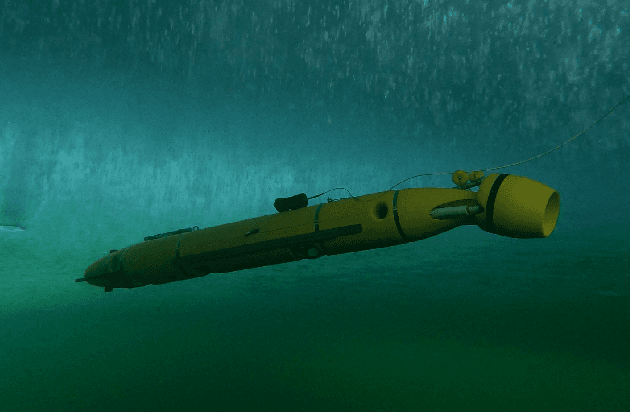
To explore oceans on ice-covered moons in the solar system, energy-efficient Autonomous Underwater Vehicles (AUVs) with long ranges must cover enough distance to record and collect enough data. These usually underactuated vehicles are hard to control when performing tasks such as vertical docking or the inspection of vertical walls. This paper introduces a control strategy for DeepLeng to navigate in the ice-covered ocean of Jupiter's moon Europa and presents simulation results preceding a discussion on what is further needed for robust control during the mission.
* 7 pages, 8 figures
Linear Model Predictive Control for a planar free-floating platform: A comparison of binary input constraint formulations
Dec 17, 2023



This work develops a first Model Predictive Control for European Space Agencies 3-dof free-floating platform. The challenges of the platform are the on/off thrusters, which cannot be actuated continuously and which are subject to certain timing constraints. This work compares penalty-term, Linear Complementarity Constraints, and classical Mixed Integer formulations in order to develop a controller that natively handles binary inputs. Furthermore, linear constraints are proposed which enforce the timing constraints. Only the Mixed Integer formulation turns out to work sufficiently. Hence, this work develops a new Mixed Integer MPC on the decoupled model of the platform. Feasibility analysis and simulation results show that for a short enough prediction horizon, this controller can (sub)optimally stabilize and control the system under consideration of the constraints in real-time.
AcroMonk: A Minimalist Underactuated Brachiating Robot
May 15, 2023Brachiation is a dynamic, coordinated swinging maneuver of body and arms used by monkeys and apes to move between branches. As a unique underactuated mode of locomotion, it is interesting to study from a robotics perspective since it can broaden the deployment scenarios for humanoids and animaloids. While several brachiating robots of varying complexity have been proposed in the past, this paper presents the simplest possible prototype of a brachiation robot, using only a single actuator and unactuated grippers. The novel passive gripper design allows it to snap on and release from monkey bars, while guaranteeing well defined start and end poses of the swing. The brachiation behavior is realized in three different ways, using trajectory optimization via direct collocation and stabilization by a model-based time-varying linear quadratic regulator (TVLQR) or model-free proportional derivative (PD) control, as well as by a reinforcement learning (RL) based control policy. The three control schemes are compared in terms of robustness to disturbances, mass uncertainty, and energy consumption. The system design and controllers have been open-sourced. Due to its minimal and open design, the system can serve as a canonical underactuated platform for education and research.
* The open-source implementation is available at https://github.com/dfki-ric-underactuated-lab/acromonk and a video demonstration of the experiments can be accessed at https://youtu.be/FIcDNtJo9Jc}
Trajectory Optimization and Following for a Three Degrees of Freedom Overactuated Floating Platform
Jul 21, 2022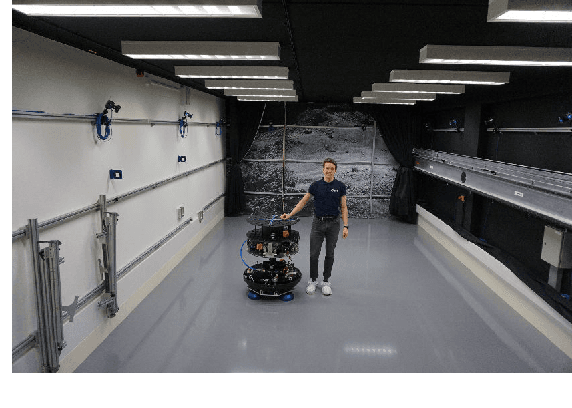
Space robotics applications, such as Active Space Debris Removal (ASDR), require representative testing before launch. A commonly used approach to emulate the microgravity environment in space is air-bearing based platforms on flat-floors, such as the European Space Agency's Orbital Robotics and GNC Lab (ORGL). This work proposes a control architecture for a floating platform at the ORGL, equipped with eight solenoid-valve-based thrusters and one reaction wheel. The control architecture consists of two main components: a trajectory planner that finds optimal trajectories connecting two states and a trajectory follower that follows any physically feasible trajectory. The controller is first evaluated within an introduced simulation, achieving a 100 % success rate at finding and following trajectories to the origin within a Monte-Carlo test. Individual trajectories are also successfully followed by the physical system. In this work, we showcase the ability of the controller to reject disturbances and follow a straight-line trajectory within tens of centimeters.
Finding and Following Optimal Trajectories for an Overactuated Floating Robotic Platform
Jun 08, 2022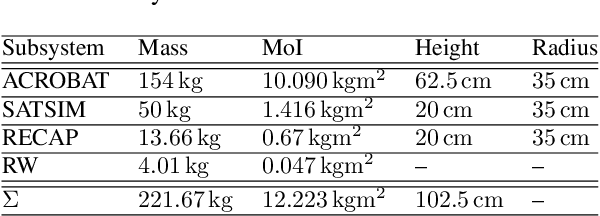

The recent increase in yearly spacecraft launches and the high number of planned launches have raised questions about maintaining accessibility to space for all interested parties. A key to sustaining the future of space-flight is the ability to service malfunctioning - and actively remove dysfunctional spacecraft from orbit. Robotic platforms that autonomously perform these tasks are a topic of ongoing research and thus must undergo thorough testing before launch. For representative system-level testing, the European Space Agency (ESA) uses, among other things, the Orbital Robotics and GNC Lab (ORGL), a flat-floor facility where air-bearing based platforms exhibit free-floating behavior in three Degrees of Freedom (DoF). This work introduces a representative simulation of a free-floating platform in the testing environment and a software framework for controller development. Finally, this work proposes a controller within that framework for finding and following optimal trajectories between arbitrary states, which is evaluated in simulation and reality.