 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model-Base Control of Quadrupeds via Online System Identification using Kalman Filter
Jun 16, 2025Many real-world applications require legged robots to be able to carry variable payloads. Model-based controllers such as model predictive control (MPC) have become the de facto standard in research for controlling these systems. However, most model-based control architectures use fixed plant models, which limits their applicability to different tasks. In this paper, we present a Kalman filter (KF) formulation for online identification of the mass and center of mass (COM) of a four-legged robot. We evaluate our method on a quadrupedal robot carrying various payloads and find that it is more robust to strong measurement noise than classical recursive least squares (RLS) methods. Moreover, it improves the tracking performance of the model-based controller with varying payloads when the model parameters are adjusted at runtime.
Reinforcement Learning for Robust Athletic Intelligence: Lessons from the 2nd 'AI Olympics with RealAIGym' Competition
Mar 19, 2025In the field of robotics many different approaches ranging from classical planning over optimal control to reinforcement learning (RL) are developed and borrowed from other fields to achieve reliable control in diverse tasks. In order to get a clear understanding of their individual strengths and weaknesses and their applicability in real world robotic scenarios is it important to benchmark and compare their performances not only in a simulation but also on real hardware. The '2nd AI Olympics with RealAIGym' competition was held at the IROS 2024 conference to contribute to this cause and evaluate different controllers according to their ability to solve a dynamic control problem on an underactuated double pendulum system with chaotic dynamics. This paper describes the four different RL methods submitted by the participating teams, presents their performance in the swing-up task on a real double pendulum, measured against various criteria, and discusses their transferability from simulation to real hardware and their robustness to external disturbances.
Sitting, Standing and Walking Control of the Series-Parallel Hybrid Recupera-Reha Exoskeleton
Oct 08, 2024



This paper presents advancements in the functionalities of the Recupera-Reha lower extremity exoskeleton robot. The exoskeleton features a series-parallel hybrid design characterized by multiple kinematic loops resulting in 148 degrees of freedom in its spanning tree and 102 independent loop closure constraints, which poses significant challenges for modeling and control. To address these challenges, we applied an optimal control approach to generate feasible trajectories such as sitting, standing, and static walking, and tested these trajectories on the exoskeleton robot. Our method efficiently solves the optimal control problem using a serial abstraction of the model to generate trajectories. It then utilizes the full series-parallel hybrid model, which takes all the kinematic loop constraints into account to generate the final actuator commands. The experimental results demonstrate the effectiveness of our approach in generating the desired motions for the exoskeleton.
Model Predictive Parkour Control of a Monoped Hopper in Dynamically Changing Environments
Aug 26, 2024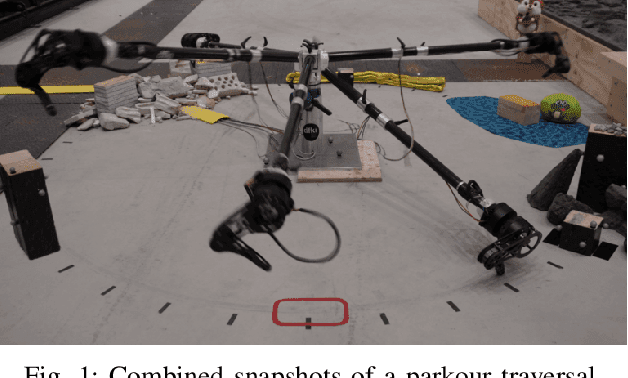
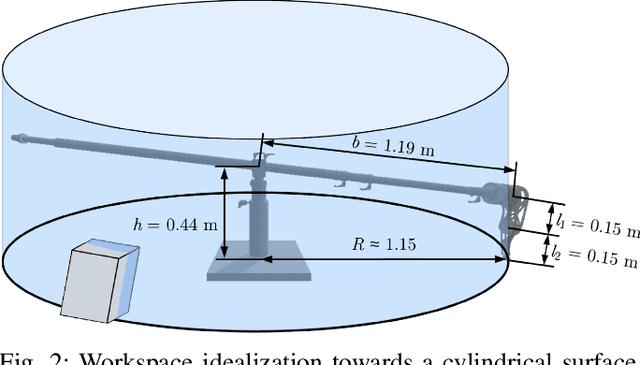
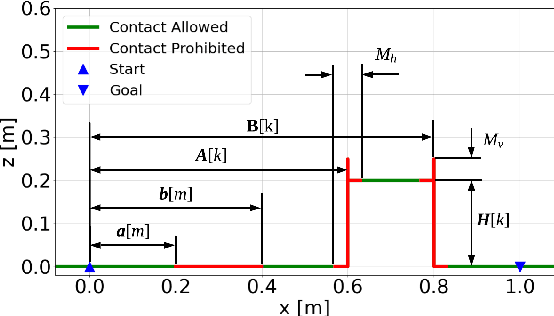
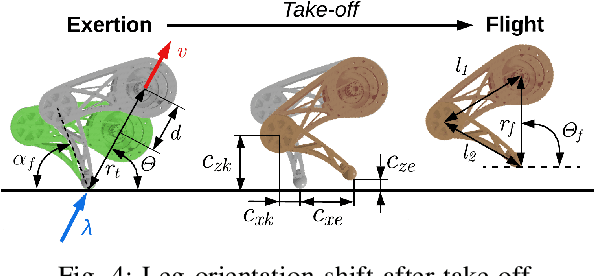
A great advantage of legged robots is their ability to operate on particularly difficult and obstructed terrain, which demands dynamic, robust, and precise movements. The study of obstacle courses provides invaluable insights into the challenges legged robots face, offering a controlled environment to assess and enhance their capabilities. Traversing it with a one-legged hopper introduces intricate challenges, such as planning over contacts and dealing with flight phases, which necessitates a sophisticated controller. A novel model predictive parkour controller is introduced, that finds an optimal path through a real-time changing obstacle course with mixed integer motion planning. The execution of this optimized path is then achieved through a state machine employing a PD control scheme with feedforward torques, ensuring robust and accurate performance.
Enhancing Otological Surgery: Co-Designing a Parallel Robot with Surgeon Input
Aug 06, 2024This work presents the development of a parallel manipulator used for otological surgery from the perspective of co-design. Co-design refers to the simultaneous involvement of the end-users (surgeons), stakeholders (designers, ergonomic experts, manufacturers), and experts from the fields of optimization and mechanisms. The role of each member is discussed in detail and the interactions between the stakeholders are presented. Co-design facilitates a reduction in the parameter space considered during mechanism optimization, leading to a more efficient design process. Additionally, the co-design principles help avoid unforeseen errors and help in quicker adaptation of the proposed solution.
Kinetostatic Analysis for 6RUS Parallel Continuum Robot using Cosserat Rod Theory
Mar 28, 2024Parallel Continuum Robots (PCR) are closed-loop mechanisms but use elastic kinematic links connected in parallel between the end-effector (EE) and the base platform. PCRs are actuated primarily through large deflections of the interconnected elastic links unlike by rigid joints in rigid parallel mechanisms. In this paper, Cosserat rod theory-based forward and inverse kinetostatic models of 6RUS PCR are proposed. A set of simulations are performed to analyze the proposed PCR structure which includes maneuverability in 3-dimensional space through trajectory following, deformation effects due to the planar rotation of the EE platform, and axial stiffness evaluation at the EE.
RicMonk: A Three-Link Brachiation Robot with Passive Grippers for Energy-Efficient Brachiation
Mar 23, 2024This paper presents the design, analysis, and performance evaluation of RicMonk, a novel three-link brachiation robot equipped with passive hook-shaped grippers. Brachiation, an agile and energy-efficient mode of locomotion observed in primates, has inspired the development of RicMonk to explore versatile locomotion and maneuvers on ladder-like structures. The robot's anatomical resemblance to gibbons and the integration of a tail mechanism for energy injection contribute to its unique capabilities. The paper discusses the use of the Direct Collocation methodology for optimizing trajectories for the robot's dynamic behaviors and stabilization of these trajectories using a Time-varying Linear Quadratic Regulator. With RicMonk we demonstrate bidirectional brachiation, and provide comparative analysis with its predecessor, AcroMonk - a two-link brachiation robot, to demonstrate that the presence of a passive tail helps improve energy efficiency. The system design, controllers, and software implementation are publicly available on GitHub and the video demonstration of the experiments can be viewed YouTube.
Robust Co-Design of Canonical Underactuated Systems for Increased Certifiable Stability
Mar 16, 2024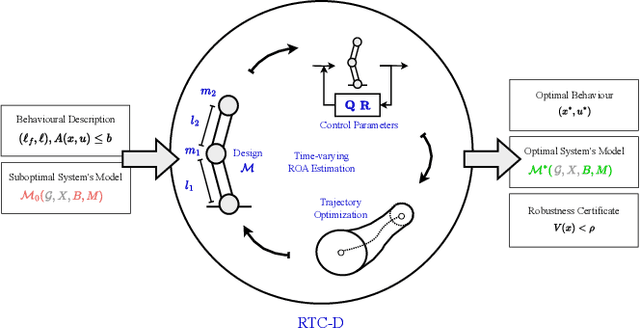



Optimal behaviours of a system to perform a specific task can be achieved by leveraging the coupling between trajectory optimization, stabilization, and design optimization. This approach is particularly advantageous for underactuated systems, which are systems that have fewer actuators than degrees of freedom and thus require for more elaborate control systems. This paper proposes a novel co-design algorithm, namely Robust Trajectory Control with Design optimization (RTC-D). An inner optimization layer (RTC) simultaneously performs direct transcription (DIRTRAN) to find a nominal trajectory while computing optimal hyperparameters for a stabilizing time-varying linear quadratic regulator (TVLQR). RTC-D augments RTC with a design optimization layer, maximizing the system's robustness through a time-varying Lyapunov-based region of attraction (ROA) analysis. This analysis provides a formal guarantee of stability for a set of off-nominal states. The proposed algorithm has been tested on two different underactuated systems: the torque-limited simple pendulum and the cart-pole. Extensive simulations of off-nominal initial conditions demonstrate improved robustness, while real-system experiments show increased insensitivity to torque disturbances.
Deriving Rewards for Reinforcement Learning from Symbolic Behaviour Descriptions of Bipedal Walking
Dec 16, 2023Generating physical movement behaviours from their symbolic description is a long-standing challenge in artificial intelligence (AI) and robotics, requiring insights into numerical optimization methods as well as into formalizations from symbolic AI and reasoning. In this paper, a novel approach to finding a reward function from a symbolic description is proposed. The intended system behaviour is modelled as a hybrid automaton, which reduces the system state space to allow more efficient reinforcement learning. The approach is applied to bipedal walking, by modelling the walking robot as a hybrid automaton over state space orthants, and used with the compass walker to derive a reward that incentivizes following the hybrid automaton cycle. As a result, training times of reinforcement learning controllers are reduced while final walking speed is increased. The approach can serve as a blueprint how to generate reward functions from symbolic AI and reasoning.
End-to-End Reinforcement Learning for Torque Based Variable Height Hopping
Jul 31, 2023Legged locomotion is arguably the most suited and versatile mode to deal with natural or unstructured terrains. Intensive research into dynamic walking and running controllers has recently yielded great advances, both in the optimal control and reinforcement learning (RL) literature. Hopping is a challenging dynamic task involving a flight phase and has the potential to increase the traversability of legged robots. Model based control for hopping typically relies on accurate detection of different jump phases, such as lift-off or touch down, and using different controllers for each phase. In this paper, we present a end-to-end RL based torque controller that learns to implicitly detect the relevant jump phases, removing the need to provide manual heuristics for state detection. We also extend a method for simulation to reality transfer of the learned controller to contact rich dynamic tasks, resulting in successful deployment on the robot after training without parameter tuning.