 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinetostatic Analysis for 6RUS Parallel Continuum Robot using Cosserat Rod Theory
Mar 28, 2024Parallel Continuum Robots (PCR) are closed-loop mechanisms but use elastic kinematic links connected in parallel between the end-effector (EE) and the base platform. PCRs are actuated primarily through large deflections of the interconnected elastic links unlike by rigid joints in rigid parallel mechanisms. In this paper, Cosserat rod theory-based forward and inverse kinetostatic models of 6RUS PCR are proposed. A set of simulations are performed to analyze the proposed PCR structure which includes maneuverability in 3-dimensional space through trajectory following, deformation effects due to the planar rotation of the EE platform, and axial stiffness evaluation at the EE.
A comparative study on 2-DOF variable stiffness mechanisms
Mar 19, 2020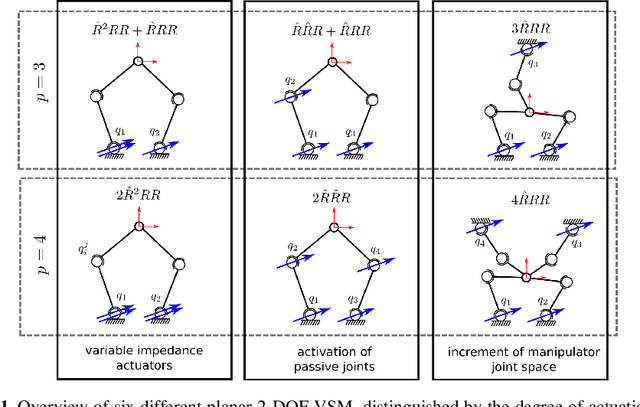
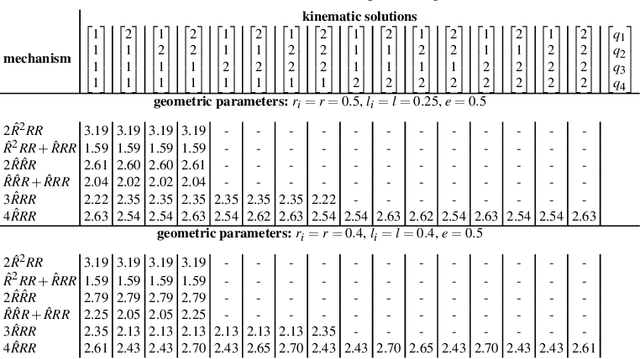
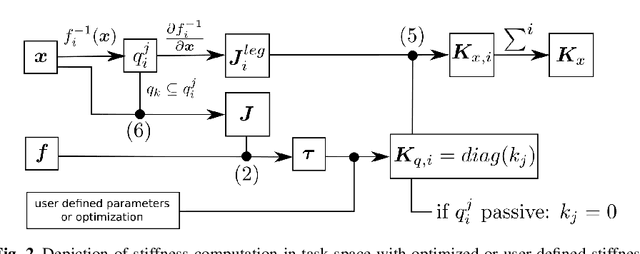
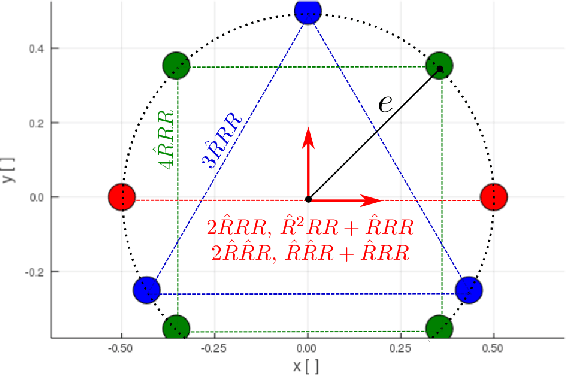
Based on the idea of variable stiffness mechanisms, a variety of such mechanisms is shown in this work. Specifically, 2-DOF parallel kinematic machines equipped with redundant actuators and non-linear springs in the actuated joints are presented and a comparative overview is drawn. Accordingly, a general stiffness formulation in task space of all mechanisms is given. Under fixed geometric parameters, optimization of task space stiffness is carried out on the designs comprising all kinematic solutions. Finally, a stiffness metric is introduced that allows a quantitative comparison of the given mechanism designs. This gives rise to design guidelines for engineers but also shows an interesting outline for future applications of variable stiffness mechanisms.