 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinetostatic Analysis for 6RUS Parallel Continuum Robot using Cosserat Rod Theory
Mar 28, 2024Parallel Continuum Robots (PCR) are closed-loop mechanisms but use elastic kinematic links connected in parallel between the end-effector (EE) and the base platform. PCRs are actuated primarily through large deflections of the interconnected elastic links unlike by rigid joints in rigid parallel mechanisms. In this paper, Cosserat rod theory-based forward and inverse kinetostatic models of 6RUS PCR are proposed. A set of simulations are performed to analyze the proposed PCR structure which includes maneuverability in 3-dimensional space through trajectory following, deformation effects due to the planar rotation of the EE platform, and axial stiffness evaluation at the EE.
Automated Segmentation of Lesions in Ultrasound Using Semi-pixel-wise Cycle Generative Adversarial Nets
May 27, 2019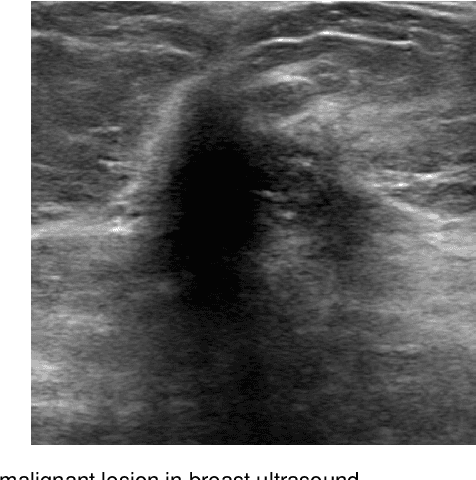
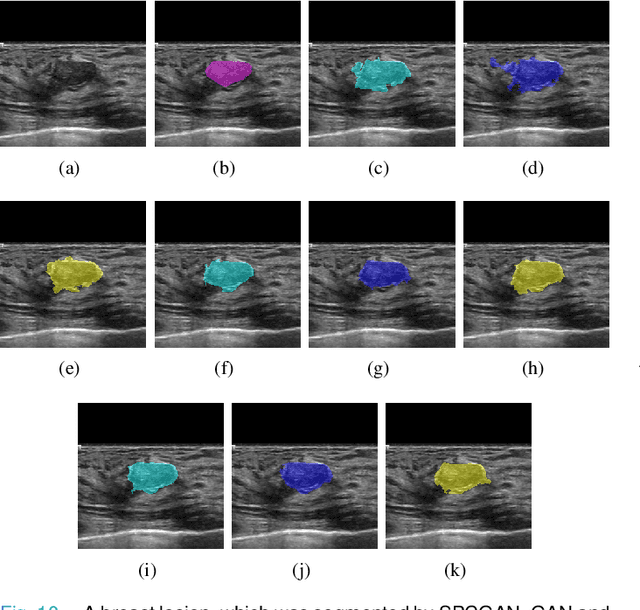
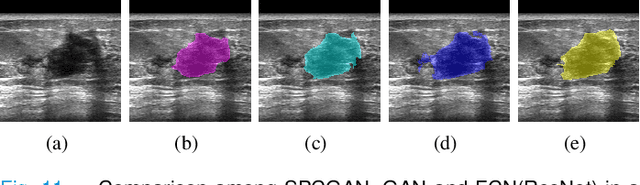
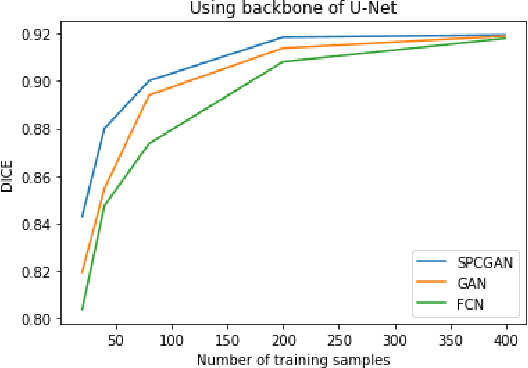
Breast cancer is the most common invasive cancer with the highest cancer occurrence in females. Handheld ultrasound is one of the most efficient ways to identify and diagnose the breast cancer. The area and the shape information of a lesion is very helpful for clinicians to make diagnostic decisions. In this study we propose a new deep-learning scheme, semi-pixel-wise cycle generative adversarial net (SPCGAN) for segmenting the lesion in 2D ultrasound. The method takes the advantage of a fully connected convolutional neural network (FCN) and a generative adversarial net to segment a lesion by using prior knowledge. We compared the proposed method to a fully connected neural network and the level set segmentation method on a test dataset consisting of 32 malignant lesions and 109 benign lesions. Our proposed method achieved a Dice similarity coefficient (DSC) of 0.92 while FCN and the level set achieved 0.90 and 0.79 respectively. Particularly, for malignant lesions, our method increases the DSC (0.90) of the fully connected neural network to 0.93 significantly (p$<$0.001). The results show that our SPCGAN can obtain robust segmentation results and may be used to relieve the radiologists' burden for annotation.